Translate or Scale Subdivision Objects | ||
| ||
-
From the
Subdivision section of the
action bar,
create a 2D or 3D subdivision object.
Note: A 3D subdivision box is used in this procedure.

-
From the
Subdivision section of the
action bar,
click
Flex
 .
Note: Press Esc to exit the command.The Robot appears at the end of the axis line. Click
.
Note: Press Esc to exit the command.The Robot appears at the end of the axis line. Click to flip the start and end of the flex line.
to flip the start and end of the flex line.
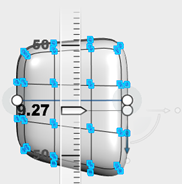
- Optional:
Drag the dark circle handles in the
Robot
to scale the end of the subdivision.
-
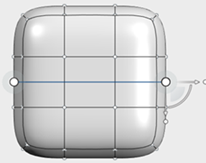
Select the entities and drag one end of the
Robot
or the blob.
Blue inference lines appear on the other end aligned to the subdivision's horizontal and vertical axis.

-
Hover over the blue inference line and snap to them.

-
Click
 .
.
