You can create a circle by defining any two points lying on
the circle and the radius.
From the
section of the action bar, click Circle.
In the Circle type list, select the Two points and
radius circle type.
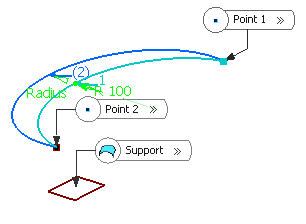
In the Point 1 and Point 2 boxes, select
two points on a surface or in the same plane.
In the Support box, select the plane or surface where the circle
is to be created.
Note:
To project the circle onto the support plane or surface, click .
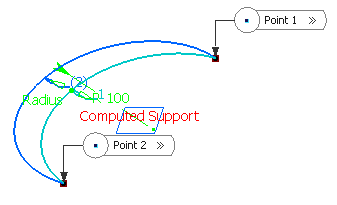
Important:
You can select a direction as the support. The support is
calculated using this direction and the two input points. The
plane passing through the two points and whose normal is closest to the given
direction is computed as follows:
Let's take V1 as the vector P1P2, where P1 and P2 are the input points.
Let's take V2 as the user direction (which can be the Robot direction).
Compute V3 = V1 X V2 (cross product).
Compute V4 = V3 X V1 (cross product).
The support plane is normal to V4 and passing through P1 and P2.
Note that if V2 is orthogonal to V1, V4 = V2 and the support plane is normal to V2
(user direction).
In the Radius box, type the value or use the arrows to change
the value.
Note:
To switch to diameter, click .
The circle, passing through the first selected point and the second point or the
projection of this second point on the plane tangent to the surface at the first point,
is previewed. Depending on the active Circle Limitations icon,
the corresponding circle or circular arc is displayed. For a circular arc, you can
specify the trimmed or complementary arc using the two selected points as end points.
With a plane as Support With a direction as Support (the computed plane is shown in blue)
To specify the axis computation mode, select the Axis
computation check box.
To specify the center computation mode, select the Center
computation check box.
Click to select the other
circular arc that is suitable for current specifications.
Click OK to create the circle or circular arc.
The circle (identified as Circle.xxx
) is added to the tree.
 .
.
 .
. .
.
 to select the other
circular arc that is suitable for current specifications.
to select the other
circular arc that is suitable for current specifications.