Using the Frenet Trihedron Axis Orientation | ||||||
|
| |||||
Context: The Frenet Thrihedron method consists in orienting the axis in such a way that one of the component is a tangent to the curve at the given point and the other component is the normal to the curve at that point. The third component is defined as the cross product of the first two components. The specification features that are patterned along a path sometimes require some specific placement.

-
Select
Frenet Trihedron as orientation axis.
The Y direction of the axis is based on the axis normal marked in yellow:


The normal for each point is calculated automatically along the curve. -
Now for linear segments, the Frenet Trihedron lets you can define tangent element for the segment:

-
Select the element (join). The normal direction is calculated on the segment along an imposed direction, that is the Z-component of the robot.

By default the computed tangent and normal to the curve at the linear segment is shown. -
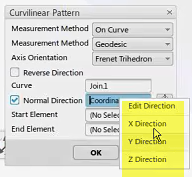
To specify a normal direction, select the Normal Direction check box. Then, either:
- Click the Robot button to rotate directly the axis and better determine the z-normal along the curve.

- Select the global local X, Y, Z axis directly in the Normal Direction box by right-click. Note: If you need to specify specific coordinates values for X, Y, Z, you can select Edit Direction.
Notes:- If the direction specified for an axis is erroneous, the axis is colored in red.
- Selecting the Normal Direction check box applies the normal direction to both the spline and linear segment.
- Click the Robot button to rotate directly the axis and better determine the z-normal along the curve.