Lock the Current Robot Orientation
You can lock the current Robot orientation so that it cannot change, whatever actions you do with it.
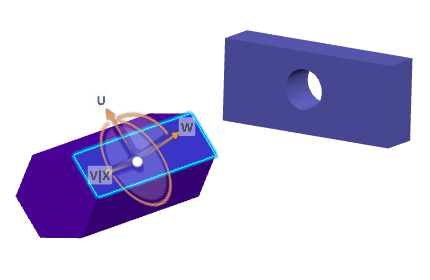
- Drag the Robot onto the object.When you drop the Robot onto the object, this orientation is kept.
Important: When you select Lock current orientation mode, you cannot change the Robot orientation (either manually or automatically), whatever the actions that are done with the Robot. In particular, the Robot orientation is kept even if you select Use Local Axis System. -
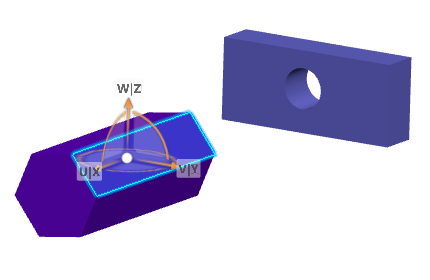
Right-click, and then clear Lock Current Orientation.
The Robot is reoriented.