Description
The Robot is displayed by default in the lower-right corner of the tab. When you move your mouse over the Robot, it is zoomed in for easier manipulation.
- The Robot has three axes, which are represented by the letters X, Y and Z. The z-axis is the default orientation.
- The blue sphere is the manipulation handle you use to drag the Robot and place on objects to be manipulated. You can also rotate objects around this point.
- The base of the Robot, the XY plane, is the privileged plane.
This concept is not useful when simply using Select. It is only useful
for commands that use handles which require working planes (for
example, when creating planar patches or modifying control points).
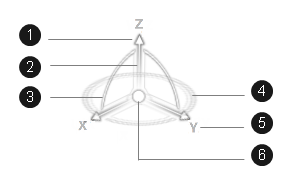
- (1) Arrow
- (2) Axis
- (3) Arc
- (4) Privileged plane
- (5) Axis label
- (6) Manipulation handle
- When the Robot is dropped onto an object, the labels are always
visible:

- When the Robot is dragged over objects, its symbol remains oriented the same.
- The pointer shape changes according to the element you are hovering over:
Arc Plane Axis 


