Acceleration Mode and Scaling | ||||
|
| |||
The Acceleration Mode defines the method used to constrain the acceleration rate/time duration.
Two acceleration modes are available:
- Constant Time, where acceleration is constrained by joint acceleration time.
- Variable Time, where acceleration constrained by joint max acceleration rate.
These options allow you to control the motion through acceleration.

Scaling is used to scale velocity profiles when adjusting each joint motion duration for coordination (except for SLEW motion).
Two scaling modes are available:
- Constant, where all joints shares the same acceleration time given from the slowest joint (this is identical to Acceleration mode set to Constant Time with all joint acceleration time equal).
- Variable, where each joint can have a different acceleration time, allowing a change in acceleration rate.
The Scaling options provide the ability to have all joints having the same acceleration time to minimize vibrations (torque is applied during acceleration).
As a consequence of this behavior, having Acceleration Mode set to Constant Time is incompatible with Scaling set to Constant. Therefore, Scaling is automatically switched to Variable when Acceleration Mode is set to Constant Time.
In this scenario, the time that you define is used for the acceleration time, and the acceleration rate is modified to adjust motion duration.

The following table summarizes the behavior of the possible Acceleration Mode and Scaling settings.
| Acceleration Mode = Constant Time | Acceleration Mode = Variable Time | |
|---|---|---|
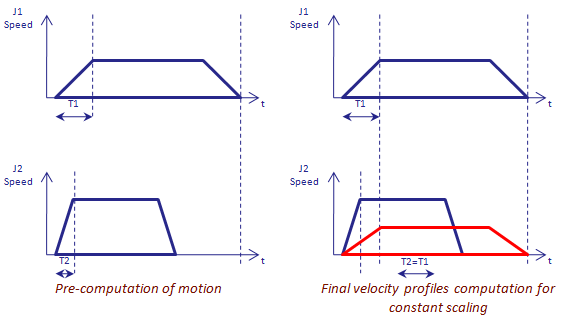
| Scaling = Constant | Not applicable | T1 computed from user-defined acceleration rate. T2 is adjusted to T1.  |
| Scaling = Variable | T1 and T2 are user-defined. T1 and T2 constrain the acceleration time.  | T1 and T2 computed from user-defined acceleration rate. During scaling, T2 is recalculated to make motion finish at the same time. 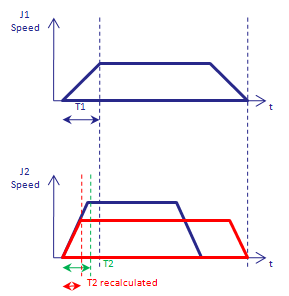 |