Robot Controller Sampling Rate
The sample rate is a feature of each controller regardless of the type of device controlled: e.g., a PLC or a robot.
Sampling Rate or Heartbeat
This represents a rate at which the
interpolation calculations are made.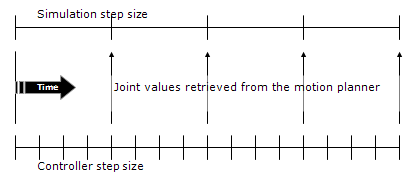
The sample
rate is a rate at which the controller samples its own internal state.
Some controllers are faster, which means they have a higher sample rate (in
Hertz). Though the sample rate
values vary, the typical range is from 12-50ms. It means that every 12-50ms, a controller performs one full cycle of internal state sampling. Internal
state can be the state of I/O, motion planning calculations, interrupt
sampling, etc. In terms of motion planning, the existence of a sample rate means that the
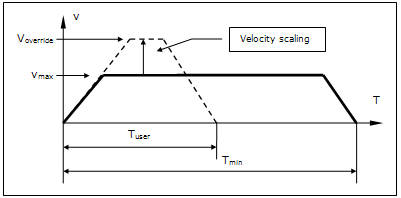
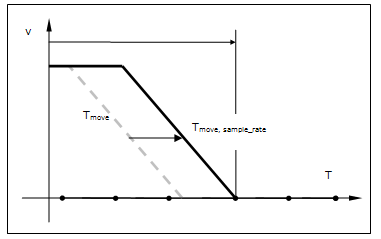
total motion time has to be a multiple of the sample rate. The figure below
illustrates a standard, trapezoidal velocity profile.

In the image above, the total amount of travel time
is represented by Tmove. The trapezoidal profile ends up
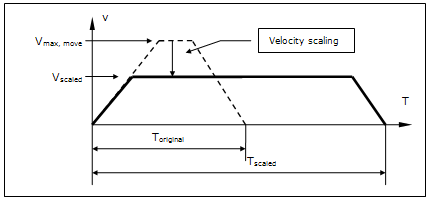
in between the dots representing the sample rate. This occurs due to the motion calculations. However, once the controller sample
rate criterion is applied, the motion time has to be extended to the first
multiple of the sample rate that is larger than Tmove, as the figure below illustrates.
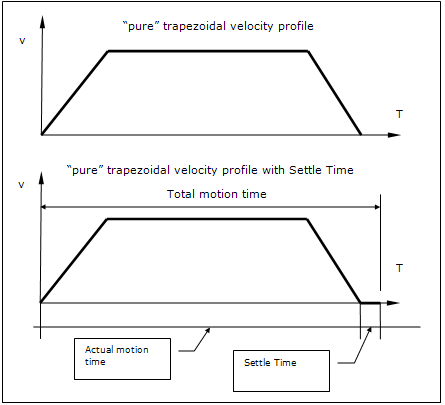
Settle time represents the amount of time between the moment the
motion stops and the moment vibrations of the mechanisms become
negligible.
The overall result is increase of the cycle time.
Sample Rate vs. Simulation Time
The key difference between the sample rate and
simulation time is that the sample rate represents time steps at which
motion interpolation takes place, while simulation time represents the
rate at which update of visualization takes place

There are three possible cases when it comes to the
sample rate vs. simulation time: Response delay represents an amount of time between the moment the
motion command is issued by the controller and the actual start of
motion.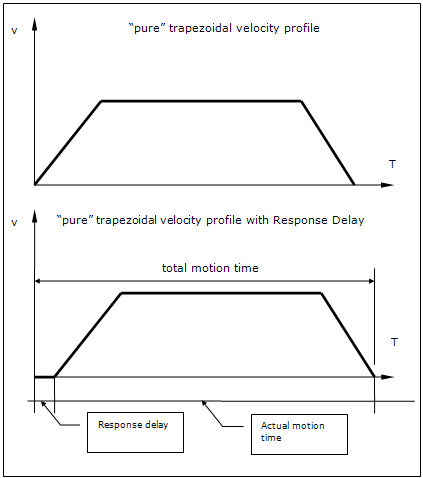
Settle time represents the amount of time between the moment the
motion stops and the moment vibrations of the mechanisms become
negligible.
The overall result is increase of the cycle time.