| Motion groups | - Motion groups are a set of devices to be programmed as a single entity to reflect existing controllers, mostly for download
- Does not require a parent/child relationship
- Though they are grouped, each entity remains independent in terms of motion (although the program considers them as both)
- Only one inverse kinematic device per group
| - Requires resource typing
- Requires attachment and ports (if relative motion is needed)
| - Allows for different motion groups to be created for the same set of devices, allowing different programs on each motion group
- Allows for coordinated motion programmation
| - Grouped devices are not kinematically solved altogether.
|
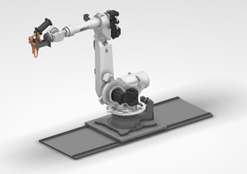
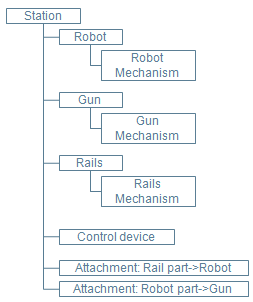
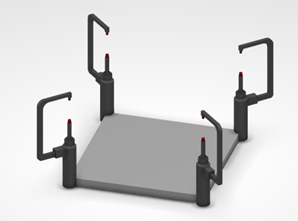
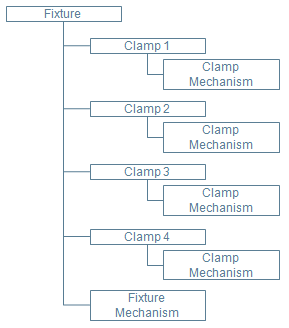
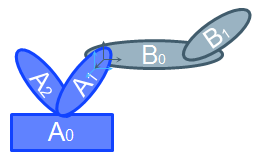
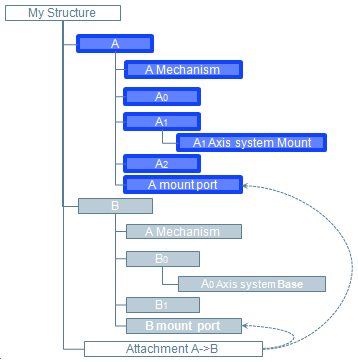
| Mechanisms | - Mechanisms may combine kinematic sub-elements into a single one (so it can be programmed as a single entity)
- Sub-elements must be parented as children of the main assembly
- The motion of sub-elements are combined to reflect the mechanism system as an unique entity
| - For flexible assemblies, you must declare the joints to be flexible.
| - Allows for the resolution of a complex kinematics system altogether.
| - Once a mechanism has been defined, it is not meaningful to define another mechanism and combine them for programming.
|