One type of
profile may set speed and acceleration parameters appropriate to a
particular kind of move (e.g., moving to weld point) while another
may set those parameters in a way appropriate to a different kind
of move (e.g., a via point).
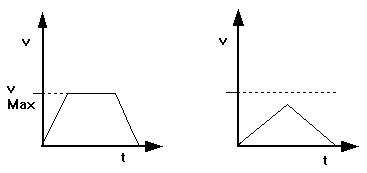
The standard velocity vs. time profile for a move is modeled as
a trapezoid, with equal magnitudes assumed for acceleration and
deceleration. If the initial and final velocities are equal, this
will result in equal acceleration and deceleration times. Based on
the distance between points and the specified TCP speed, the
velocity/time profile may end up being a triangle, i.e., the
maximum speed may never be attained (see the following
diagrams).