Data Management | ||
| ||
Introduction
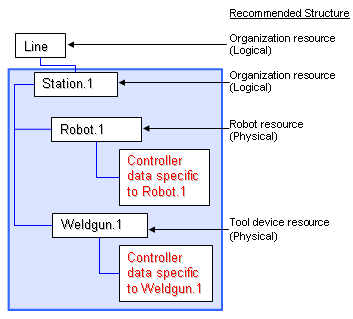
To better support advanced collaborative scenarios, the data defined on a robot (such as controller profiles) is specific to the robot instance used in the station. This means that:
- Multiple instances of the same robot can be under a station, each with its own set of parameters defined for the controller data.
- This station can be used in another line and still use the same controller data defined on each robot.
- Opening the station itself or in another context (like in the Line) provides the same controller data.
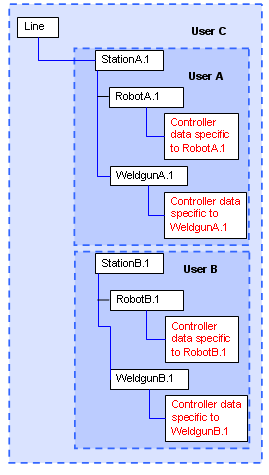
In this scenario:
- User A can work in Station A.1. Changes saved in Station A.1 are available to User C and User B.
- User B can work in Station B.1. Changes saved in Station B.1 are available to User C and User A.
- If allowed, User C can perform changes in StationA.1 and StationB.1. When these changes are saved, they will automatically be there the next time User A (or B) opens Station A (or B).
Currently, data is managed at the first common logical level (most commonly a station) found between the actual physical resources (like robots, guns, tools, etc.).
The consequences for these business rules are as follows:
- If there are some some controller data that was defined in previous release, it must be removed and created again. A warning message appears when such a case arises.
- The station becomes "unique", even when it is used many times. Any changes applied to the controller station data will be available for all instances of this particular station.
Example: Consider a station A containing two robots. This station is used twice within a Line (StationA.1 and Station A.2). Any change on the controller data applied in Station A.1 will also be applied in Station A.2.