Overview of the Migration of Device Controllers | ||
| ||
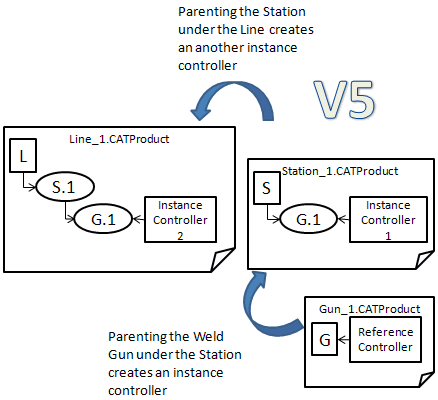
Creation of a Device Instance Controller in V5
Instance controllers are created in the following manner in V5:
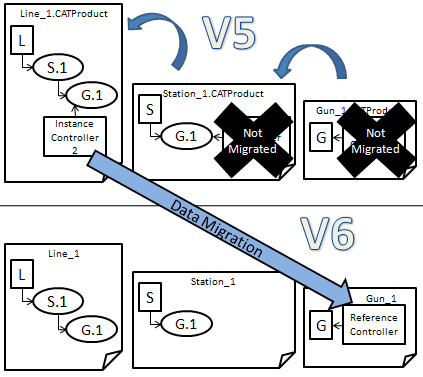
Migration of V5 Device Controller data to V6
- Travel Limits
- If travel limits have not explicitly been defined for a robot in V5, the V5 Travel Limits command displays default values that may be drawn from the joint commands or other sources. The V6 Travel Limits command uses different logic to find these default values. As a consequence, an imported V5 robot that does not have defined travel limit values may display different values in that command between V5 and V6.