Define a TCP Safety Zone
You can constrain the TCP of a robot by defining several zones.
-
From the Setup section of the action bar, click TCP safety zone
 .
You are prompted to select a resource to create a safety zone.
.
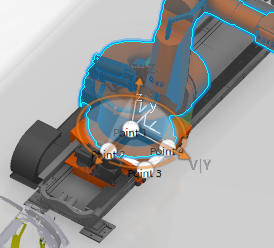
You are prompted to select a resource to create a safety zone. - Select a resource in the work area.The TCP Safety Zone panel appears, providing properties for defining the geometry that will be the safety zone. In the work area, a number of points connected by lines appear at the base of the resource that represent the initial state of the safety zone.
By default, the safety zone is polyhedral in shape. You can also select Cylinder from the Shape type list.
-
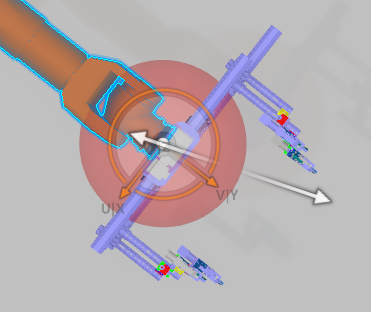
Enter values directly in the panel, or click on a point in the work area to snap the orientation Robot to it.
Once the orientation Robot is snapped to a point, you can use it to move the point to a desired location to begin defining the safety zone.
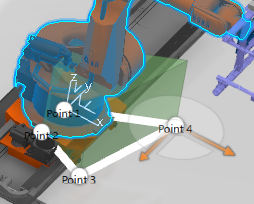
As you increase the size of the safety zone, passing the cursor over it also reveals vertical and horizontal arrows that you can use to define the shape and size of the safety zone.
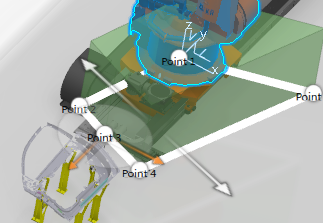
Passing the cursor over a white line will also prompt you to click on the line to create a new point at that cursor location.
- When you have defined the safety zone, click OK.

The safety zone is created under the Safety Zones node under the resource in the tree. You can edit it by double-clicking it in the tree.
 .
.
 .
.