Grouping with a Motion Group | ||
| ||
-
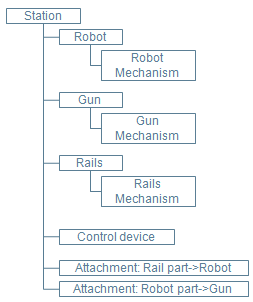
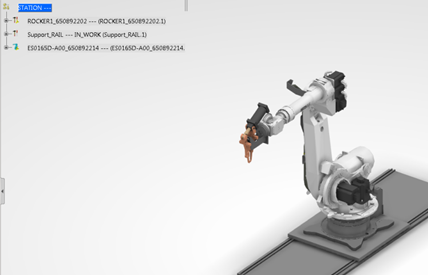
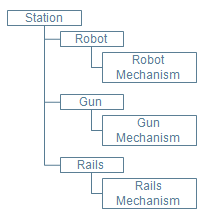
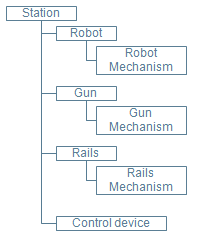
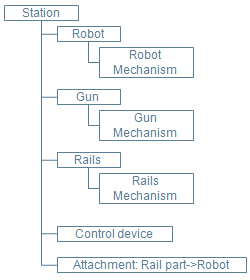
Create the initial set of data, such as the robot, gun and rails shown below.
-
Right-click at the station level and select to create a product that will act as the control device.
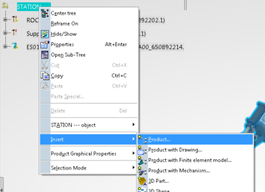
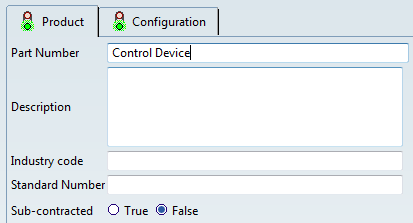
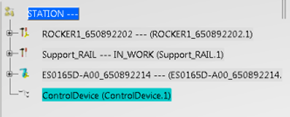
Once inserted, the control device appears in the tree:
-
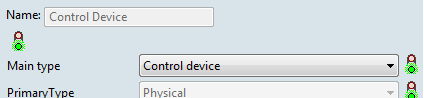
To type the control device as a resource, click Generate a Resource
 You are prompted to select a product.
You are prompted to select a product. - Type the control device product as a resource of type Control device.
-
Create motion groups at the device level.

-
Use Set Tool to create an attachment between the rail and robot.
Note that:
- The ports have been predefined
- The link goes from PARENT (rail mount port) to CHILD (robot base port)
- The Motion Group field is valuated
-
Use Set Tool to create an attachment between the robot and the gun.
Note that:
- The ports have been predefined
- The link goes from PARENT (robot mount port) to CHILD (gun base port)
- The Motion Group field is valuated
- For programmation purposes, the working TCP is valuated (for inverse kinematic programming only)