Defining Home Positions | |||
| |||
- From the Motion Controller section of the action bar, select
Home
Positions
 .
. -
Select a device.
The Home Positions dialog box appears for the selected device.

- The name of the Selected Resource that controls the device is displayed at the top of the panel, and Controlled resources lists all of the resources that are controlled by that controller.
- Define home position for motion group allows you to define and view home positions that also considers the auxiliary axis. When this option is not selected, home positions are only defined on individual devices of a motion group.
- Home Positions list displays the defined home
positions for the selected resource, and provides tools to add
 , remove
, remove  , and reorder
, and reorder 
 home positions in the list.
home positions in the list.
-
Jog the device to the desired position and click to add a
new home postion to the Home Positions list.
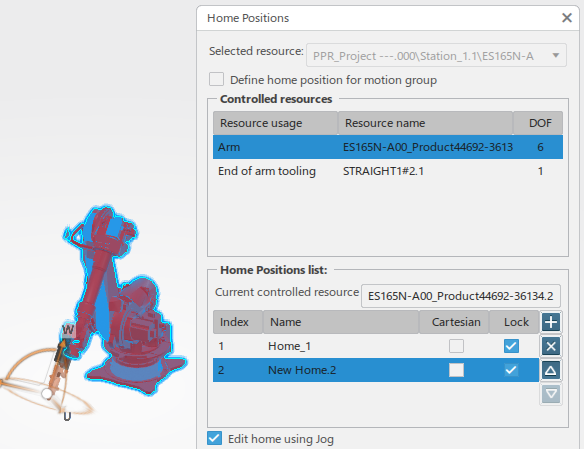
By default, Lock is selected for the new home position. When a home position is locked, it cannot be modified in Teach; it can only be modified when using Home Positions.
Home positions that have been defined for a motion group are indicated by an icon in the Home Positions list of the Jog dialog box.

-
Optional: Select Cartesian to store the
Cartesian values of the TCP location.
A green axis system appears at the TCP while editing the home position.

Saving the TCP for a given home position allows you to retaining it even when a comparable robot (one that can reach the given TCP) replaces the original robot.