Mounting a device
You can mount a device on another device.
-
In the Motion Controller section of the action bar, click Define Mechanical Resource
 .
You are prompted to select a mechanical resource with kinematics.
.
You are prompted to select a mechanical resource with kinematics. -
Select the tool that you would like to mount.
The Define Mechanical Resource context toolbar appears.

-
Select Mount/Unmount

All of the base ports defined on the selected resource are shown in the work area. If there is only one base port defined, it is automatically selected as shown below.

If more than one base port is defined on the resource, select the desired port in the work area.
You are prompted to select the parent device to which the child will be mounted.
-
Select the parent device in the work area.
All of the mount ports defined on the selected resource are shown in the work area. If there is only one mount port defined on the parent resource, it is automatically selected and the tool is mounted to it as shown below.
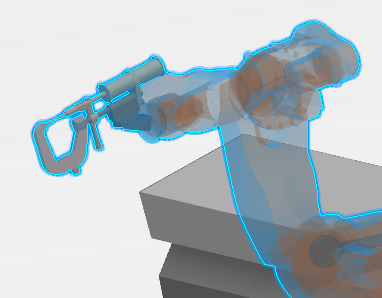
If more than one mount port is defined on the parent resource, select the desired port in the work area. The tool is then snapped on the robot, such that the mount port axis on the robot is coincident with the base port axis on the tool. The orientation Robot can be used to fine tune the position of the mounted tool.
After the tool is snapped to the robot, the Mount dialog box appears.