-
Open a simulation with objects in collision/penetration on a Track.
Note:
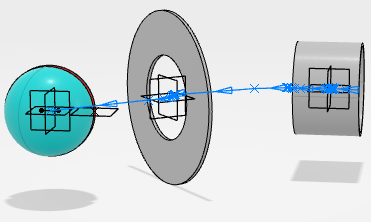
Only activate this option when the expected computed path has an object moving
through another object. This includes cases where an object is moving through a ring or
a tube. In other cases, the option must be kept cleared and computation will use the
existing algorithm for better performance.
-
Run the Path Planning command in the
Simulation section of the action bar and select the
Track.
- Open the Path Finder parameters panel.
The Path Finder parameters panel appears.
-
Go to the Multi-Clearance tab in the Path Finder parameters panel.
- Use the list menu to set the Global Clash Limit to Collision allowed and define the required value.
- Check the option Enable Inclusion Detection for Collision.
-
Click Find Track
 in the context toolbar.
in the context toolbar.

The attributes set in the
Path
Finder parameters panel enable the collision allowed mode, so
collision/penetration is allowed between context and moving objects.
A simulation plays where collision/penetration is allowed between context and moving objects.