Finding and Optimizing a Collision-Free Track | |||||
|
| ||||
-
Select the Track and from the Simulation
section of the action bar,
click Path Planning
 .
.
Default parameters are used. No Path Planning option is modified.
Default start and end points are define on the first and last points.
-
Click Find Track
 in the context toolbars.
The Track is generated. All the points in the Track are collision free.
in the context toolbars.
The Track is generated. All the points in the Track are collision free.
-
Click Optimize Track
 in
the context toolbars.
The Track is simplified and smoother. It has fewer points, and unnecessary rotations and motions are removed.
in
the context toolbars.
The Track is simplified and smoother. It has fewer points, and unnecessary rotations and motions are removed.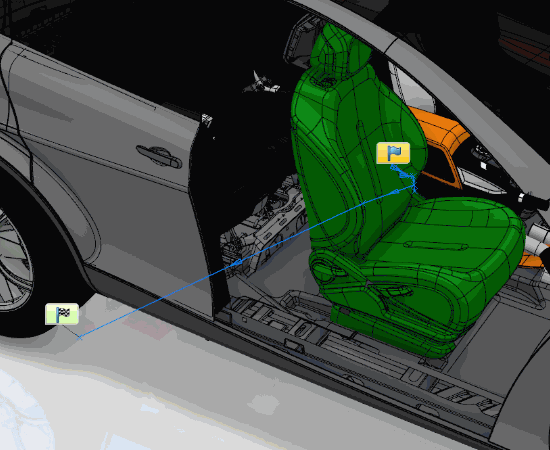
-
Click OK
 in the
context toolbars to save the Track.
in the
context toolbars to save the Track.
-
Simulate the Track using the controls on the Play panel to verify
that it is collision free.
