Using the Bounding Box and Translation Reference Axis System | |||||
|
| ||||
-
Select the Track and in the Simulation section of the action bar,
click Path Planning
 .
.
Default start and end points are set on the first and last points.
-
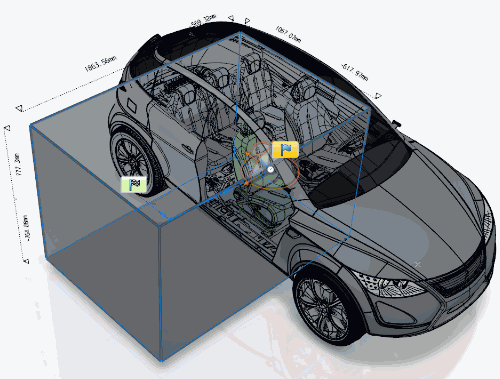
Click
Display Bounding Box
 in the context toolbar.
in the context toolbar.
A bounding box appears. A Robot appears at the start point.
The default limits of the box are computed from the positions of start, end, and intermediate points, and the positions and size of moving objects.
-
Click Find Track
 in the context toolbar.
The Track is generated. All the points in the Track are collision free.
in the context toolbar.
The Track is generated. All the points in the Track are collision free. -
Click OK
 in the
context toolbar to save the Track.
in the
context toolbar to save the Track.