Positioner Programming Dialog Box | ||
| ||
General section
- Task
-
Specifies the selected task that has a positioner to be programmed. If a robot was selected instead of a task, you can click the current Task value to view a list of active tasks.
Selecting a different task automatically refreshes the Motion Group list and updates the contents of the Results dialog box.
- Motion Group
Motion Group allows you to select a motion group from a list of all motion groups managed by the current task that will be programmed. Click the current value to see the list of motion groups.
If a motion group contains one or more positioners, the Positioners list is refreshed to contain the names of those positioners.
- Positioners
-
Positioners allows you to select a positioner to be programmed from a list of all positioners associated to the selected Motion Group. Click the current value to see the list of positioners.
Upon selecting a positioner, it is highlighted in the work area.
- Jog
- Jog allows you to show (On) or hide (Off) the Jog dialog box to view or modify additional kinematic properties. Click the current value to toggle between Off and On
- Track
- Track activates/deactivates tag tracking based on the selected operation. By activating this property and selecting an operation in the Results dialog box, you can manipulate the positioner axis/axes directly while having the robot TCP locked on the tag. Click the current value to toggle between Off and On.
- Clash
-
Clash activates/deactivates clash analysis, which provides a visual clue of a possible clash between the object mounted on a positioner and a weld gun. When a clash occurs, both the object and the weld gun become highlighted:
Click the current value to toggle between Off and On.
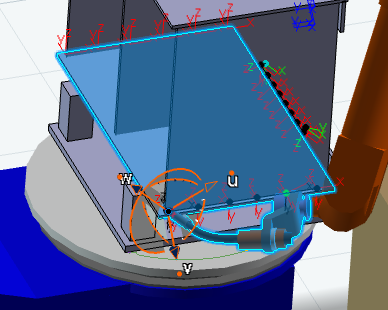
- Reach
Reach activates/deactivates reach analysis. When On, the welding object becomes transparent and the reach disc is displayed.

The reach disc provides a visual clue on how the roll angle (rotation around the z-axis) influences reachability. Each color of the reach disc has the following meaning:
- Green: reachable
- Yellow: reachable, but out of limits
- Red: unreachable
- Blue: clash area (available only when Clash is On)