Reach Zones Limit for Grasping | ||
| ||
General Information
The range of these reach zones defines according to these parameters, and the neutral position of the arm is at 0 degrees. The arm is down along the body.
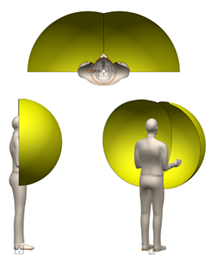
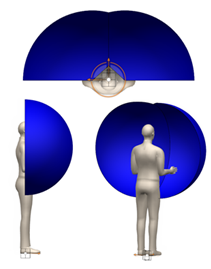
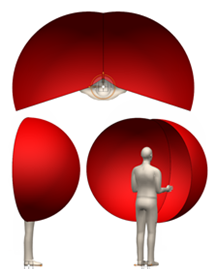
The 4 reach zones display with the following characteristics:
- Displays in 3D with its own referential and the projection of the H-point at the level of the feet (under the feet).
- Its relative position from its referential calculates based on the working posture (standing or sitting), the side, and the anthropometry characteristics specified from the toolbar.
- It has no links with any manikins in the scene (totally independent from them).
- Move using the Robot. This automatically snaps on its referential at creation or while using Place Mode. This can manually snap on it at any time like for all other objects in the 3D viewer.
- It has its own Origin. This Origin is the projection of the H-point (middle point of the pelvis) at the level of the floor (under the feet), for standing or sitting posture. In addition, for the sitting posture, this origin could also be a projection at the level of the seat (under the buttocks).
- A black silhouette of a manikin (representation only) can also be displayed with each define of Reach Zones by activating the Hide/Show Silhouette.
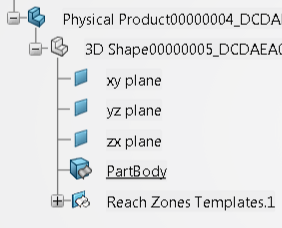
- It is a surface that is an 3DShape with all the options associated with it, Hide/show,
Delete, Save/Load, and so on.
- Once completed, double-click to edit or right-click and from the context menu select delete.
- The Reach Zones template can move around in the 3D window. When putting it in the context
of a real physical object helps for a solution. Example, for a workstation,
a table, and others. To do so, drop the Compass on the frame of the 3DShape
 and move it around. This standardized origin
representation represents the projection of the middle of the body at the
level of the feet (for origin at the floor). Or this could be for the
buttocks (for origin at the seat) for both the standing and sitting context.
and move it around. This standardized origin
representation represents the projection of the middle of the body at the
level of the feet (for origin at the floor). Or this could be for the
buttocks (for origin at the seat) for both the standing and sitting context. - A Reach Zones Template stores as a 3DShape like all other 3DShapes and reuse for other needs.
Construction Parameters
Gender - Select the gender.
Population - Select the population for the manikin.
Percentile - Select the percentile for the manikin.
Display Options
Context - Select the position.
Side - Select the sides for the manikin.
- Primary
- It represents the limits of the zone for the fine motor task or continuous access/high
repetitive reach task (grasping an object).
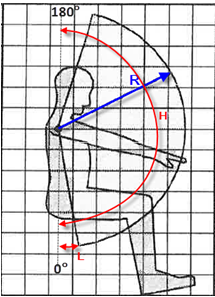
It generates from the following arm rotations values:
- Arm length (R) = 80% of arm length from shoulder (without clavicle) to hand center of grip.
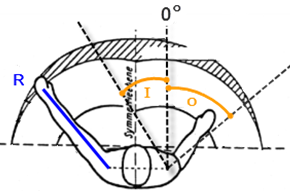
- Horizontal rotation (I) = 80% of the maximum internal rotation (90 degrees) = 75 degrees.
- Horizontal rotation (O) = 80% of the maximum external rotation (67 degrees) = 50 degrees.
- Flexion/Extension (H) = at the shoulder height = 90 degrees.
- Flexion/Extension (L) = at the elbow height = arccosine (shoulder height - elbow height) /R.
There is no movement of the upper part of the body.

- Secondary
- It represents the limits of the zone for the frequent access/moderate repetitive reach
task. In this zone, the person does not stretch their arm to a full possible
extend.
It generates from the following arm rotations values:
- Arm length (R) = 90% of arm length from shoulder (without clavicle) to hand center of grip.
- Horizontal rotation (I) = 90% of the maximum internal rotation (48 degrees) = 40 degrees.
- Horizontal rotation (O) = until the arm is on the side = 90 degrees.
- Flexion/Extension (H) = 90% of the maximum flexion = 170 degrees.
- Flexion/Extension (L) = neutral position = 0 degrees.
There is no movement of the upper part of the body.

- Secondary Maximal
- It represents the limits of the zone for the occasional access/low repetitive reach task.
This maximum used at frequent movements causes muscle fatigue (Merkel,
2012).
It generates from the following arm rotations values:
- Arm length (R) = 100% of arm length from shoulder (without clavicle) to hand center of grip.
- Horizontal rotation (I) = 100% of the maximum internal rotation (48 degrees) = 48 degrees.
- Horizontal rotation (O) = until the arm is on the side = 90 degrees.
- Flexion/Extension (H) = 100% of the maximum flexion = 180 degrees.
- Flexion/Extension (L) = neutral position = 0 degrees.
There is no movement of the upper part of the body and the arm and forearm outstretched to a maximum.
- Tertiary
- It represents the limits of the zone for the seldom access/no repetitive reach task. This
zone involves the small motion of the upper body (spine) and represents the
maximum work area.
It generates from the following arm rotations values:
- Arm length (R) = 120% of arm length from shoulder (without clavicle) to hand center of grip.
- Horizontal rotation (I) = 120% of the maximum internal rotation (48 degrees) = 58 degrees.
- Horizontal rotation (O) = 120% of the flexion until the arm is on the side = 108 degrees.
- Flexion/Extension (H) = 100% of the maximum flexion = 180 degrees.
- Flexion/Extension (L) = neutral position = 0 degrees.
- Hide/Show Silhouette
- Hide or show the silhouette. Note: The primary reach zone limit displays by default and can hide only if at least one of the other reach zones displays.