IK Manikin Referential
You can use the general functionality of the inverse kinematics modes for the manikin referential.
- Click IK Manikin Referential
 .
. -
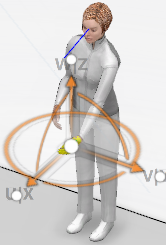
Select a manikin segment. Example Left
Hand.
The robot attaches to the left hand.

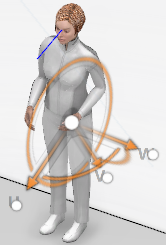
- On the Robot, select the axis corresponding to
the direction of the required movement and start dragging.The controlled point follows the Robot movements.
 .
.