Using Reach | |||
| |||
-
Click
Reach (position only)
 .
.
-
In the
work area,
select the target geometry (top of the engine).
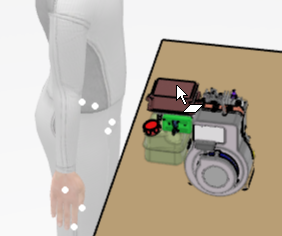
The hand snaps to the top of the engine using the position only.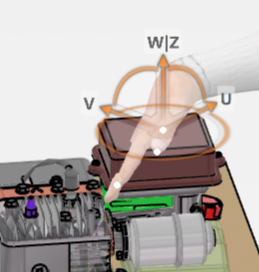
-
Select
Reach (position and orientation)
The hand moves to the orientation of the part and the position.

With Reach still active, manipulate the Robot to fine-tune the posture.