You can use the ruler to specify offsets.
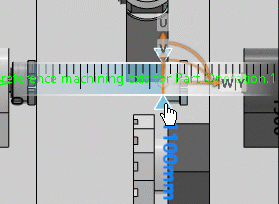
To specify offsets, the ruler has two grab handle triangles. The ruler
also has one editable number representing the current value.
A single selection of any of the linear handles display the
corresponding rulers and the current value. Linear offsets can be modified by:
- Grabbing/ moving the handle arrows of the
Robot.
- Grabbing/ moving the handle triangles of the ruler. The stepping
of the value will depend on the scale.
- Editing the number of the ruler.
A single selection of the handle arcs will display rotational rulers
depending on how many angles are modified. If only one angle is modified, then
the value will be shown beside the ruler. If more than one angle is modified,
then the value will be shown as zero.
Consecutive selections of the handle arcs will cause a flip. For
example, a resource could be rotated by 180 degrees along the positive
direction of the axis. Here, the number of linear rulers being displayed at a
time depend on the number of linear values being changed when the handle arrows
of the
Robot
are moved. If a single angle is provided in one of the handle arcs, then two
linear rulers will be visible.
When two or three linear rulers are shown, only one value can be
modified by grabbing/ moving the handle triangles of ruler. It can also be
modified by editing the number of the ruler.