Create Waypoint Motions
You can insert Waypoint motions in a robot task and visualize the Waypoint hierarchy.
Before you begin: The following steps assume you are in the Teach environment
editing a robot task.
-
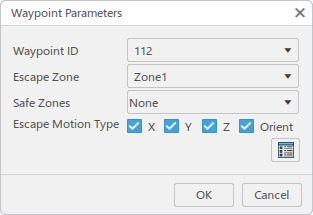
In the Teach context toolbar, click Insert Waypoint Motion
 .
The Insert Waypoint Motion dialog box appears.
.
The Insert Waypoint Motion dialog box appears.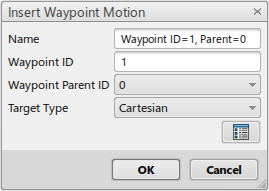
-
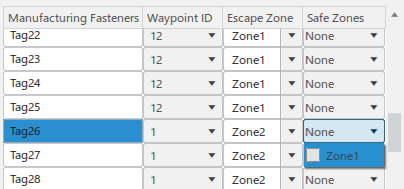
Enter the necessary values and click Display Waypoint
Hierarchy.
The root Waypoint motion doesn't have a Waypoint Parent Waypoint ID. There can only be single root Waypoint in a task.
The Waypoint Hierarchy dialog box appears, displaying each Waypoint ID that has been created relative to its parent in hierarchical form.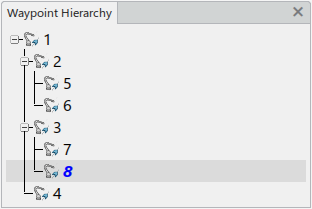



 .
.

 in
the
in
the 

 .
.

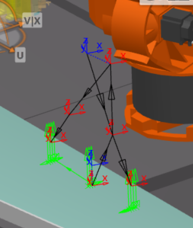
 to
view the current waypoint layout.
to
view the current waypoint layout.



 .
.