-
Select a resource.
-
In the Sequencing panel, click Create Simulation Sensor
 .
.
- The Simulation Sensor dialog box appears. Default values are already entered for the Beam Length, the Grabbing Port, and the Name of the sensor.
- In the work area, the sensor beam is visible at the origin of the grabbing port.

Note:
The Grabbing Port list contains the list of the mechanical ports associated to the resource.
- In theSimulation Sensor dialog box, change the Grabbing Port.
-
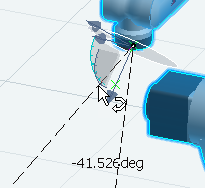
In the work area, use the Robot manipulator to define the position and angle of the sensor (double-click the Robot to see the precise sensor position).
-
When the position is correct, click the checkmark to close the Simulation Sensor dialog box.
- The sensor is no longer visible in the work area.
- The new simulation sensor appears in the Sensor tab of the Resource Entities area in theSequencing panel.
- To modify any properties of the sensor, double-click the sensor name in the Resource Entities area.
This simulation sensor can now be used as parameter of a Grab activity.