- Preempting AGV From Parking
- You can choose to preempt the AGV with a parking task. If selected, the AGV
preemptively performs the parking task before completing other tasks. If not, the AGV
performs the parking task and cannot be preempted until the task is complete.
Note:
This
is group-specific.
-
- From the Programming section of the action bar, click Parking Group Definition.
- In the dialog box that appears, select Preempt AGV From
Parking.
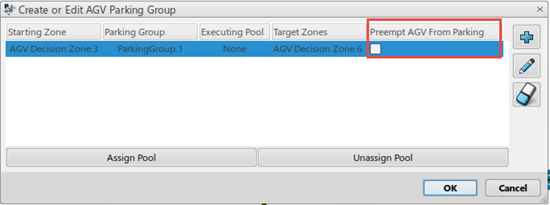
- Click OK.
- Enabling Rotation at Sharp Turns
- If selected in the Simulation Options dialog box, the AGV rotates
at Segments with Sharp turns and enters the next segment. You can specify the rotation
speed in the Configure Pathway dialog box.
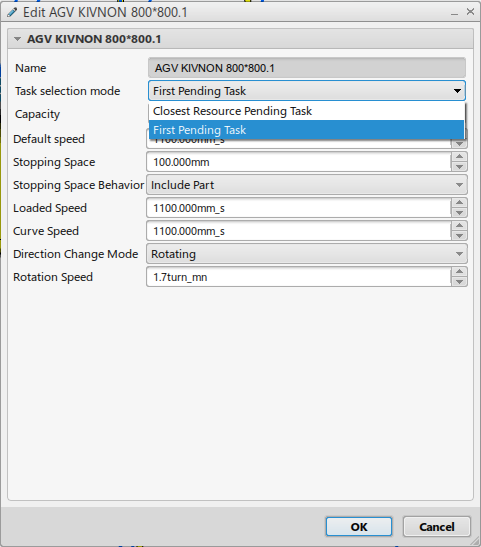
- AGV Task Selection
- You can specify the task priority for an AGV.
-
- Right-click an AGV resource in the tree and select Edit
from the context menu.
- In the dialog box that appears, select one of the following:
- First Pending Task: The AGV performs tasks based on the
order of tasks assignment. Even if an AGV has a task in the next decision zone,
it completes the first pending task from the list of tasks.
- Closest Pending Task: The AGV performs the next closest
task available.
 - Defining a Station Model
- When a station is defined on an AGV pathway, AGV unloads the part at the station
Start Zone and moves to station End
Zone.
-
- From the Programming section of the action bar, click Resource Configuration.
- Right-click a Pathway resource, and select Edit Stations
from the context menu.
- Select a Start Zone and End
Zone.
- You can also define a depart requirement at station Start Zone:
Wait for Part at Station End. This ensures that the AGV waits
at station Start Zone until the part arrives at the station
End Zone. Once the part arrives, the AGV moves to station
End Zone.
- You can choose to specify a depart requirement at station End
Zone. You can also specify Load Till Capacity. This
ensures that the AGV drops the product at station Start Zone and
picks a product up again at the station End Zone.
- Defining Route Groups Based on Target Requests
- If selected, the system routes the AGV to the target decision zone if the target
decision zone's connected resource has a part carry request for the AGV. If there are no
matching requests, AGV waits at the route decision zone until there is a request for a
part.
-
- From the Programming section of the action bar, click Route Group Definition.
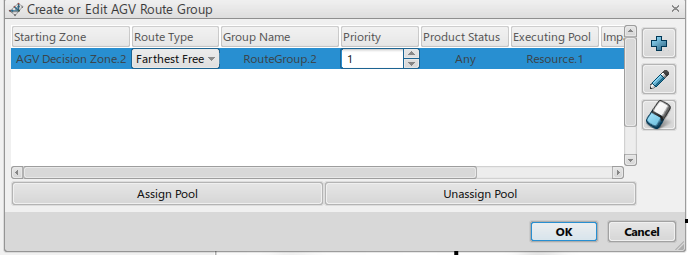
- In the dialog box that appears, select Based on Target
Request.
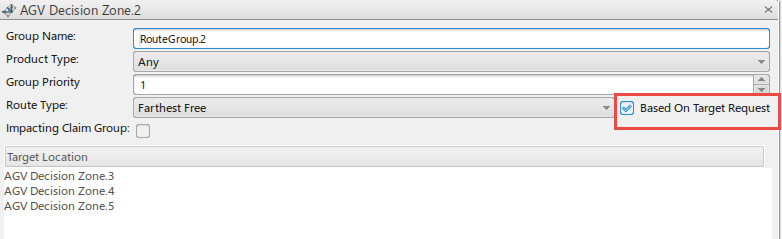
Note:
This option is available for the following route options: Cyclic, Closest Free,
Farthest Free, Priority.
- Activating AGV Pathway BI
- If selected, the pathway BI is activated, and the system highlights resources in the
work area.
 - Defining Speed Zones
- You can define and modify AGV speed zones. You can also specify a distribution for the
speed of the AGV.
-
- From the Setup section of the action bar, click Manage Speed Zones.
- In the dialog box that appears, select the pathway.
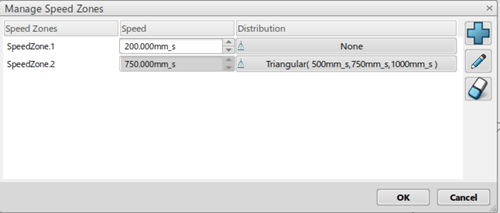
- Click Add to create a new speed zone.
- Select the entry zones. Click the check-mark to end your selection.

- Select the exit zones. Click the check-mark to end your selection.
- Use the up and down arrows to edit the speed.
- Click OK.
|