Add a Traffic Zone
You can define traffic zones at intersections for AGVs.
-
Add the entry decision zones. Then, add the exit decision zones, or select the exit
decision zone Claim Group from the list.

Add a Traffic ZoneYou can define traffic zones at intersections for AGVs.
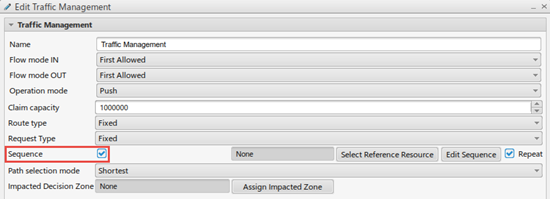
Define a Traffic Zone with Sequence BlockingYou can define a traffic mode with the Control Mode Sequence Blocking.
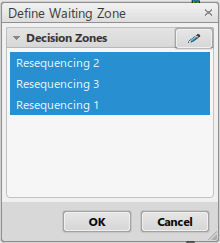
Define a Waiting Zone
Define an Impacting Zone
During simulation, if an AGV’s current decision zone has an impacting decision zone defined, the AGV considers the impacting decision zones claim count before travel. Manage a Block and Release Zone
During simulation, when the AGV starts traveling from an entry decision zone, it blocks specified decision zones. This causes the AGV to stop at the locked decision zones. When an AGV unclaims an exit decision zone of a Block and Release model, it releases specified decision zones and causes blocked AGVs to start traveling again. Define a Path Selection Mode
During simulation, when an AGV moves from a decision zone with the Path Selection Mode defined as Least Congested , it takes the path with the least AGVs. | |||||||

 to select an entry
decision zone and exit decision zone.
to select an entry
decision zone and exit decision zone.

