Set Up the Scenario for Analysis
You can select the resources, fasteners, and collision objects to be considered for the analysis.
-
From the Analysis & Output section of the action bar,
click Analyze Targets
 .
.
The Spot Analysis Scenario dialog box appears.
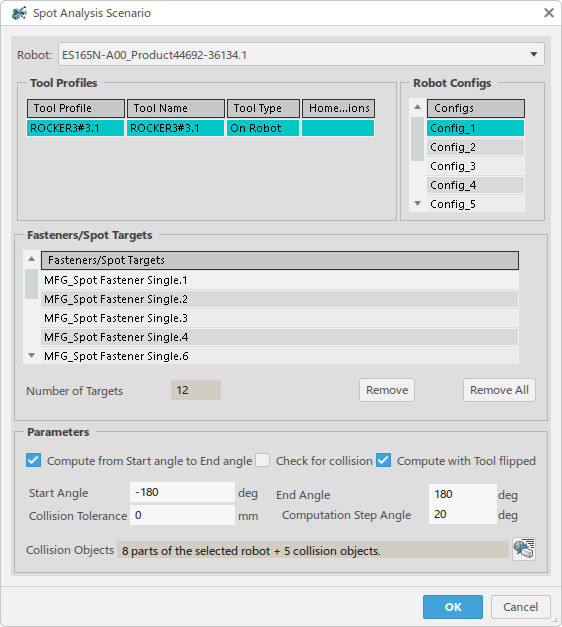
If a physical organizational resource is the ASO, all of the robots in the physical organizational resource are considered for analysis and listed in the Robot list. Depending on the current selected robot, the corresponding weld analysis data (trajectories, tool profiles, configs and welds) is displayed.
- Multiple robot analysis is not supported for fixed TCP robots. If the physical organizational resource has fixed TCP robots and mobile TCP robots, only the mobile TCP robots are considered for the analysis. Each fixed TCP robot must be analyzed separately.
- If the Point Fastening operations implemented by the robot do not have spot weld trajectories, a new spot weld trajectory is automatically created for each point fastening operation and all of the manufacturing welds are added to Welds in the Analyse Target Orientation dialog box.
- If the robot implements a General operation and the Point Fastening operations owned by the General operation do not have spot weld trajectories, a new spot weld trajectory is automatically created for each Point Fastening operation.
-
Select a robot from the Robot list.

The dialog box is updated with the weld details corresponding to the selected trajectory. The entries in Tool Profiles, Robot Configs, and Fasteners/Welds frames are specific to the selected robot in the list.
Note:Point Fastening operations, General operations, spot weld trajectories or compound spot trajectories can be selected at any time while Analyze Targets is active. Selecting any of these entities adds the corresponding manufacturing welds to the Analyze Target Orientation dialog box.
If a General operation is selected, manufacturing welds of the spot weld trajectories aggregated under child Point Fastening operations are added to the Welds list. Spot weld trajectories are created for any child Point Fastening operations that do not contain a spot weld trajectory.
If a Point Fastening operation is selected that already contains a spot weld trajectory, the manufacturing welds of the spot weld trajectory are selected and added to the Welds list. If the Point Fastening operation does not contain a spot weld trajectory, a new spot weld trajectory is created.
-
Select a weld gun.
Note: If you want to use any of the weld guns defined as can-use resources on the process or the weld guns associated with the trajectory in the weld analysis, you must create tool profiles on the robot for each weld gun before using Analyze Targets. Note: Fixed TCP Tool Profiles are listed with a ToolType of Stationary.Note: Multiple tool profiles can be selected by pressing the Ctrl key on the keyboard as selections are made.
-
Double-click a row in the Tool Profiles list to select a
different home position for a particular weld gun.
The Home Positions dialog box appears.
Select one of the available home positions in the list followed by OK to set it as the current home position. You can select multiple positions by holding the Ctrl key as you make selections.
-
Select a configuration for the selected robot from the Configs
list under Robot Configs.

Note: Multiple configs can be selected by pressing Ctrl as selections are made. -
Select and edit welds as needed in the Fasteners/Welds
list.

Welds can be removed from the list by selecting them and clicking Remove. All welds can be removed with Remove All. Note that welds removed from the list are not removed from the data.
-
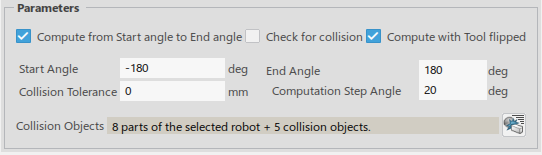
In the Parameters frame, select Compute from Start
angle and End angle to force the computation from the specified
Start Angle to End Angle even if a
feasible solution is found. When not selected, the computation for a fastener/weld stops
as soon as a feasible solution is found.
-
Collision objects specifies the number of objects that are in
collision. To edit/view the collision list, select Edit the list of collision
objects
 .
.
The Manage Collision Objects dialog box appears.

In the Robot parts used for collision frame:
- By default, the Selected Parts list contains all the parts of the robot except its base, and Available Objects list contains only the robot base.
- Objects in each of the lists are displayed in the respective viewer below each list.
- You can move any object between Available Parts and
Selected Parts lists using the arrow buttons
 and
and  , or by
double clicking the object to move in the viewer.
, or by
double clicking the object to move in the viewer. - Selected objects are cross-highlighted between entries in the list, the viewer below the list, and in the work area.

In the Collision objects frame:
- By default, Include all Objects
 is enabled. This means the Collision Parts list includes
all of the objects except for those objects in the Robot parts used for
Collision list.
is enabled. This means the Collision Parts list includes
all of the objects except for those objects in the Robot parts used for
Collision list. - You can remove any part from the list if that part should not be considered for
collision analysis by selecting the object followed by Remove
object
 .
. - You can empty the Collision objects list by deselecting
Include all objects
.
Click OK to accept any changes made and close the Manage Collision Objects dialog box. Collision objects in the Spot Analysis Scenario dialog is updated with the proper number of objects.
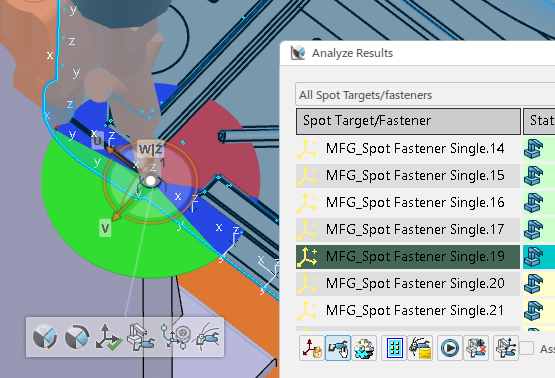
 .
.

 to view the
results of the analysis.
to view the
results of the analysis.
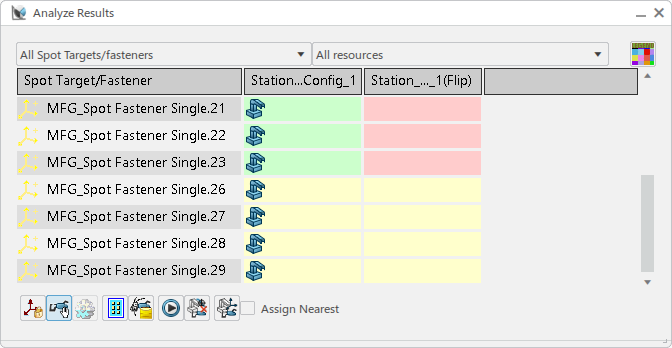
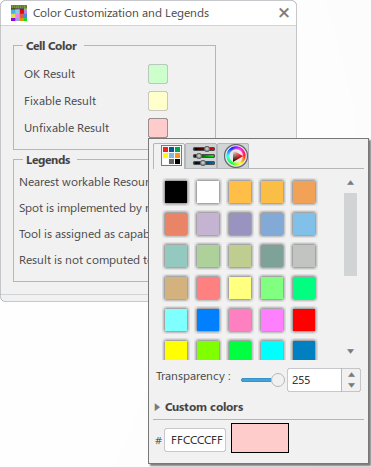
 indicates
that the target is reachable
indicates
that the target is reachable indicates
that the target is fixable
indicates
that the target is fixable indicates that
the target is unfixable
indicates that
the target is unfixable and clicking the color swatch in the
and clicking the color swatch in the