Creating a Spot Profile | |||||
|
| ||||
- Select Create Spot Profile
 .
. - The dialog box opens to the Model
Parameters tab, where you can set all model and controller
parameters. Click each parameter shown in blue to edit its value.
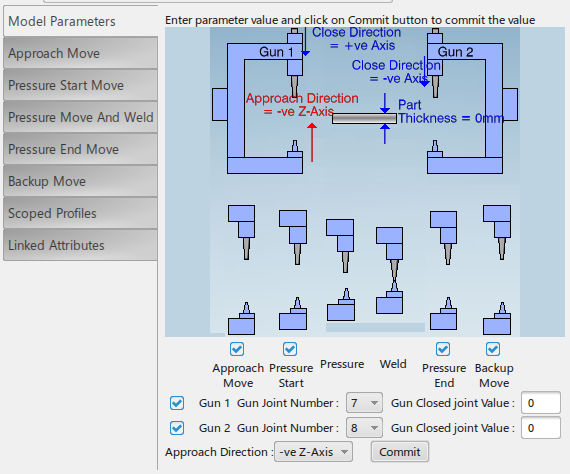 Note: Some Servo guns may have two pair of welding tips. These two pairs of welding tips are shown as 2 separate guns in all the pictures for clarity purposes. If Gun 2 is unchecked in the above dialog, all the parameters related to Gun 2 in the following tab pages will be non-editable.
Note: Some Servo guns may have two pair of welding tips. These two pairs of welding tips are shown as 2 separate guns in all the pictures for clarity purposes. If Gun 2 is unchecked in the above dialog, all the parameters related to Gun 2 in the following tab pages will be non-editable. - You can set all approach move parameters in Approach
Move tab.
Click each parameter shown in blue to edit its value.

- You can set all Pressure Start Move parameters in the
Pressure Start Move tab page. Click each parameter shown in blue to edit its value.

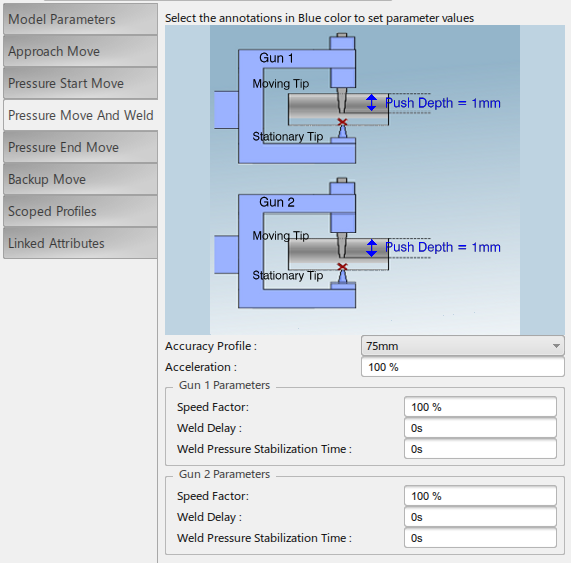
- You can set the move and weld pressure in the
Pressure Move and Weld tab page.
Click each parameter shown in blue to edit its value.
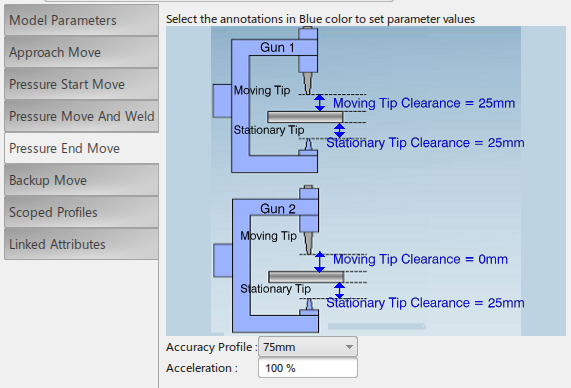
- You can set all the Pressure End Move parameters in
the Pressure End Move tab page.
Click each parameter shown in blue to edit its value.
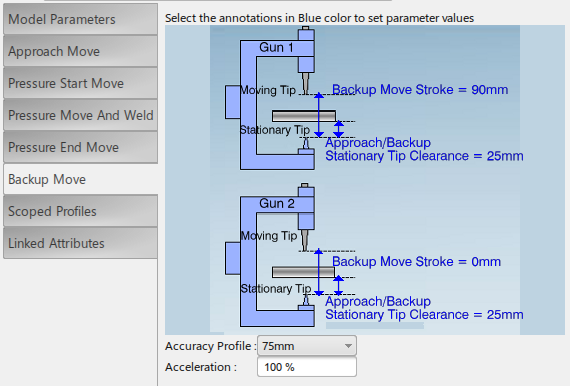
- You can set all Backup Move parameters in Backup
Move tab page.
Click each parameter shown in blue to edit its value.
- Click OK. A spot profile is created in the current controller of the selected robot. The spot profile and can be seen in the Profiles browser tab.
 Note: You can double-click an existing profile to edit it.
Note: You can double-click an existing profile to edit it.