About RRS Events/Triggers | ||
| ||
Define RRS Events
Define RRS Events allows interactive definition of a new RRS event for
the selected robot. These event definitions get applied (i.e.,
passed to the RCS module) at the start of the very next robot move
(invoked by any means such as jog, simulation, etc.). Possible
parameter values users can select in this dialog are customized
based on the RRS events features/calls supported by the RCS module.
allows interactive definition of a new RRS event for
the selected robot. These event definitions get applied (i.e.,
passed to the RCS module) at the start of the very next robot move
(invoked by any means such as jog, simulation, etc.). Possible
parameter values users can select in this dialog are customized
based on the RRS events features/calls supported by the RCS module.
Note that, if Target Type is set to Select Target, the Target Name can also be filled in by picking a tag point. If Halt Simulation Upon Trigger is On, the simulation is interrupted at the point the RRS event got triggered. If this option is Off the simulation continues, but a trigger notification message is displayed in robot's Define RRS Event message window.

Automatic RRS Event Creation During Trigger Instruction Simulation
If RCS Trigger emulation is selected in the RRS
properties tab if the robot’s Controller
Parameters/Attributes dialog box, new RRS Events are automatically
created for each Trigger instruction that is executed and applied to the move
operation that follows it during RRS simulation of a robot task containing Trigger
instructions. 
The type of RRS Event that is created and its parameters are the same as that of the
corresponding Trigger instruction. As Trigger instructions are executed during robot
task simulation, the corresponding RRS Events that are created can be seen in
robot’s Active RRS Events dialog box that is invoked using
Display RRS Events. As the RCS module signals the
triggering of these RRS Events, their corresponding actions, as defined by the
Action field of the Trigger instruction, are executed and
the RRS Event is then removed from robot’s Active RRS Events
list: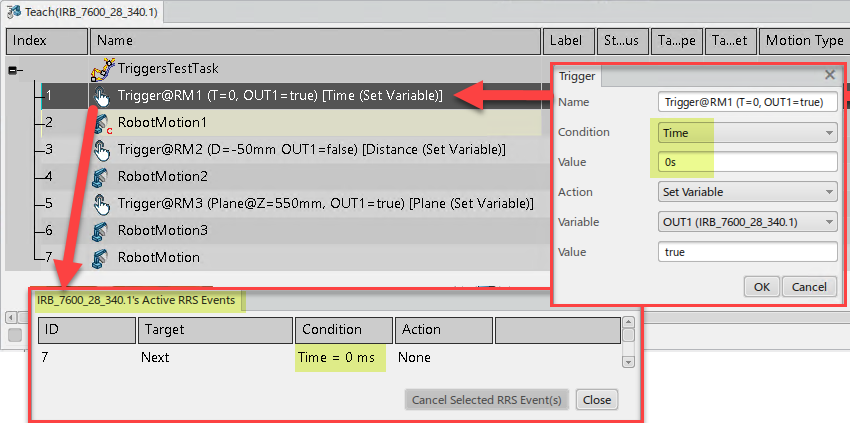
If RCS Trigger emulation is cleared, RRS Events are not created during robot task simulation and instead triggering of active Triggers is determined internally by 3DEXPERIENCE (instead of the RCS module).
Display/Cancel Active RRS Events
Display/Cancel Active RRS Events brings up a dialog box that displays all the currently
active RRS events of the selected robot and the attributes. This
dialog box remains available after you exit the command and its
contents change as events get defined, cancelled, or triggered. The Cancel
Selected RRS Events button can be used to cancel one or more active RRS
events once you have selected them in this dialog box. These event
cancellations get applied (i.e., sent to the RCS module) at the
start of the next robot move invoked by any means (such as jog or simulation).
brings up a dialog box that displays all the currently
active RRS events of the selected robot and the attributes. This
dialog box remains available after you exit the command and its
contents change as events get defined, cancelled, or triggered. The Cancel
Selected RRS Events button can be used to cancel one or more active RRS
events once you have selected them in this dialog box. These event
cancellations get applied (i.e., sent to the RCS module) at the
start of the next robot move invoked by any means (such as jog or simulation).
