Connecting RRS Using RRS Connect
You can connect a single robot to a DELMIA RCS server.
-
From the Analysis & Output section of the action bar,
click RRS
Connect
 .
.
-
From the work area
or tree, select the robot to connect to the RRS server.
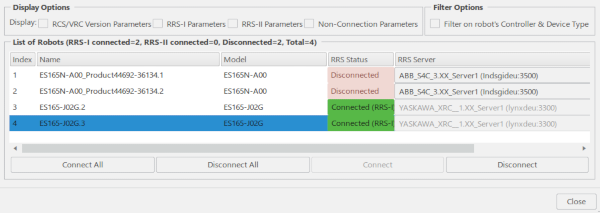
The robot's RRS Server & Device Configuration Selection dialog box appears.

-
Click the value of the RRS Server, select the RRS server to
which you want to connect from the list, and click OK.
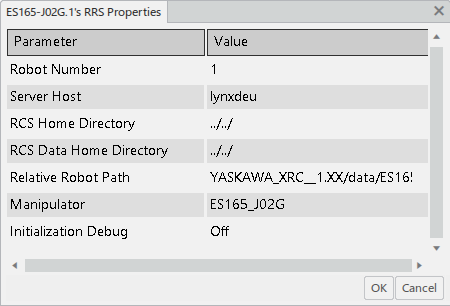
The robot's RRS Properties dialog box appears.
-
Enter values required by the RRS INITIALIZE call made to the RCS module.
- Robot Number
- Enter the number.
- Server Host
- This is either the host name or the IP address of the machine on which the DELMIA RRS Server daemon is running.
- RCS Home Directory
- The directory on the server host under which the RRS server is installed.
- RCS Data Home Directory
- The root directory under which RCS data file subdirectories are located. The RRS robot path is constructed by prepending this field to the Relative Robot Path entry. Initially, the default value of this directory is the same as the RCS Home Directory. Use the list to select other possible directories. Directories are only listed if you have previously created additional paths for the RCS Data Home Directory by using . Once you have selected a different value from the list, that value becomes the default within the current process data during your next RRS session.
Data in the Value column can be edited by clicking the existing value in a cell.

-
Click OK.
The robot's RRS message window is created.
- If the RRS connection was successful, RCS robot stamp and various module version data are displayed.
- If the connection was unsuccessful, the Messages Reporting
window displays appropriate error and warning messages:

- CAR RRS Version
- RRS standard version supported by the simulator as sent to the RCS module.
- RCS Version
- The RCS version reported by the RCS module during RRS initialization.
- RRS Shlib Version
- The version number of the current RRS shared library.
- Manipulator
- The RCS manipulator reported by the RCS module during RRS initialization.
- Controller
- The RCS controller version reported by the RCS module during RRS initialization.
- Software
- The RCS controller software version reported by the RCS module during RRS initialization.
-
To disconnect, click the RRS Connect command, pick the robot,
and click OK in the RRS Disconnect Confirmation
dialog box.

When RRS is enabled, if the RRS interface/RCS module supports inverse kinematics services inverse kinematics services, default inverse kinematics is disabled and RCS-based inverse kinematics is enabled. The RCS-based inverse kinematics is invoked indirectly through commands such as: Jog, Teach, Reach, and Autoplace. When RRS is disabled, the default inverse kinematics is automatically re-enabled.
All RRS (including RRS inverse kinematics) error messages are displayed in the device's RRS message window, rather than in the product message window. When using the Jog command, the RRS message window only appears if there is an error.