Door Opener Profile Dialog Box | ||
| ||
- Name
- The name of the Door Opener profile.
- Index
- Optional ID (used for Robot Programming applications only).
Hinge parameters
These parameters allow for the definition of a hinge, where the door (moving part) is attached to the car frame (fixed part).

- Fixed part
-
Specifies the fixed part of the hinge.
Click to enter the selection process. The dialog box becomes hidden, and reappears after a selection is made.
Recommendation: It is sometimes preferable to select the fixed part from the tree, as the car product structure can differ vastly. - Moving part
-
Specifies the moving part of the hinge.
Recommendation: Select the complete car door assembly from the tree to ensure that the complete door assembly moves. - Joint axis
-
Specifies the axis of rotation of the hinge.
Click and move the mouse pointer over the area where axis of rotation is to be defined. When a feature such as the center of a circle or axis of rotation is identified, a new axis system appears there. Confirm the location by clicking OK in the context toolbar.
- Axis Direction
- Defines the axis of the door rotation.
Contact parameters
Contact location establishes a point in which the robot starts opening the car door. Since the door revolves around the fixed axis in space, a certain level of tolerance can to be taken into account in order to allow the door to follow the robot TCP continuously.
These parameters allow for definition of an initial (grab) point of contact between the robot that opens the door and the door itself.
- Contact location
-
The contact location (typically a tag) of the door panel and robot TCP.
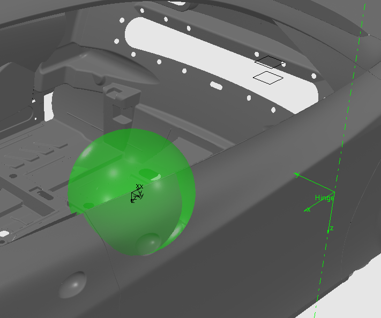
Recommendation: Create a tag point on the car door prior to the creation of the door opener profile. - Proximity
-
Defines the radius of a sphere with the contact location in the center.
This radius specifies the size of a zone around the contact point. When the robot TCP is inside of the sphere, the door will track the motion of the TCP. This prevents the TCP from overlapping with the contact point while still allowing for the door to open or close.
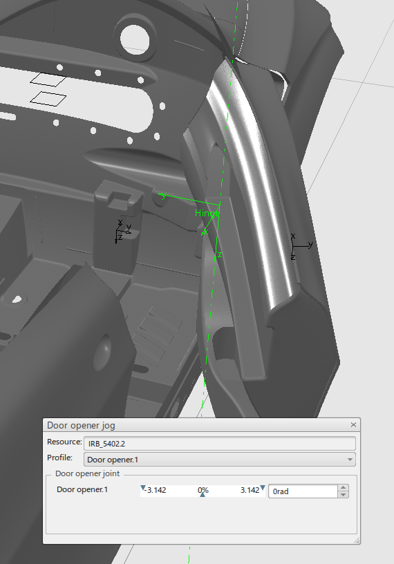
Joint values
A temporary revolute door joint is created on the hinge that allows for door manipulation. The door joint can be limited in terms of minimum and maximum values. It can also be manipulated using the Jog panel.
These parameters define the contraints of the door joint limits, and allow you to define what the door joint zero position is and how much it can open with respect to the specified zero position.
- Minimum value
- Specifies the minimum door opening angle.
- Maximum value
- Specifies the maximum door opening angle.
- Default value
- Specifies the default value for the door opener.
- Simulate Door Opener
- Allows you to manipulate the temporary door opener joint with the Jog panel.