Rail Axis Programming | |||
| |||
-
In the Programming section of the action bar,
click Compute Rail Values
 .
You are prompted to select a robot task.
.
You are prompted to select a robot task. -
Select a robot task in the Behavior side tab.
The robot for the selected task must have at least one assigned rail/gantry and at least one motion activity.
The Rail Axes Programming dialog box appears.

-
Click Compute
 to compute the aux values.
to compute the aux values.
- Click Results list
 to view the calculated aux values and the reachability status of the tag point shown for each robot motion activity.
to view the calculated aux values and the reachability status of the tag point shown for each robot motion activity.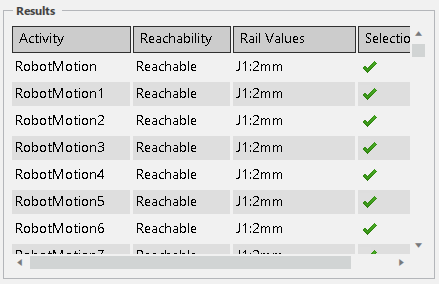
The Results view can be customized in the following manner:
- Customized Results List
 provides
a customized view where you can select the activities for analysis and subsequent
update to the model.
provides
a customized view where you can select the activities for analysis and subsequent
update to the model. - Reachable Motion Activities
 shows only
the reachable move activities in the list.
shows only
the reachable move activities in the list. - Unreachable Motion Activities
 shows only the
unreachable move activities in the list.
shows only the
unreachable move activities in the list. - Results List
shows or hides the
results list.
- Customized Results List
- Click Jog
 to jog the device to the calculated position by selecting the corresponding robot motion activity name. The robot tracks the robot target when you jog the auxiliary axes. When the target is unreachable, the robot goes back to the previous reachable position.
to jog the device to the calculated position by selecting the corresponding robot motion activity name. The robot tracks the robot target when you jog the auxiliary axes. When the target is unreachable, the robot goes back to the previous reachable position. - Click Update
 in the context toolbar near the base of the robot to update the current DOF values of the rail in the results list for the selected activity.
in the context toolbar near the base of the robot to update the current DOF values of the rail in the results list for the selected activity. 