Moving Targets
You can move selected targets based on position and orientation.
-
From the Setup section of the action bar,
click Manipulate Targets
 .
The Manipulate Targets dialog box appears.
.
The Manipulate Targets dialog box appears.
-
In the Anchor section, you can specify the frame upon which
the manipulation is applied.

- 3D Robot Handle Frame moves with respect to 3D Robot Handle Frame.
- Target's Local Frame moves with respect to the Target's Local Frame.
-
In the 3D Robot Handle section, select Show
Coordinates to see the current XYZ/YPR values of the 3D compass, through
which targets are manipulated.

Coordinates can be modified by manipulating the target(s) in the work area, or by directly changing the values in the coordinate box.
-
Select the Position and Orientation
to create a unique reference coordinate system whose values can be seen in the
coordinate box.
These lists each provide the following options:
- World: Display XYZ/RPY with regard to the World.
- Resource: Display XYZ/RPY with regard to a selected resource (robot, aux device etc.).
- Local Axis: Display XYZ/RPY with regard to the current local axis system.
- User-selected: Display XYZ/RPY with regard to a selected axis system.
- Tag: Display XYZ/RPY with regard to the a selected tag.
-
From the Referential list, select the referential to see
coordinate values with respect to the type selected.
- World: Display XYZ/RPY with regard to the World.
- Context: Display XYZ/RPY with regard to the PPR Context.
- Local Axis: Display XYZ/RPY with regard to the current local axis system.
- User-selected: Display XYZ/RPY with regard to a user selected axis system.
-
Select the Position and Orientation
to create a unique reference coordinate system whose values can be seen in the
coordinate box.
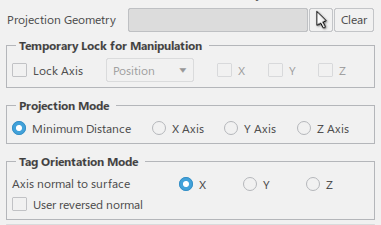
 and select the
projection geometry in the
and select the
projection geometry in the