Replicating Tasks | ||||
|
| |||
-
From the Programming section of the action bar, click Replicate Task across resources
 .
You are prompted to select a task to copy.
.
You are prompted to select a task to copy. -
Select the target robot that you want to copy the task to.
The Task copy across controllers panel appears.
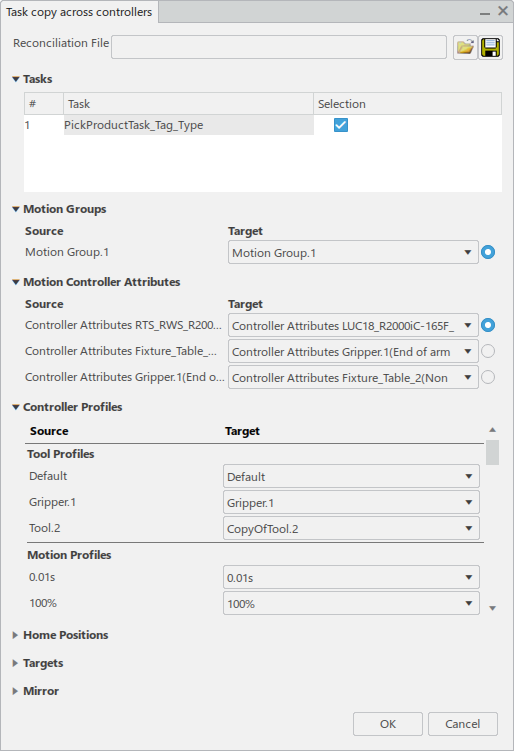
This panel allows you to define how the items to be copied from the source device to the target device are mapped to each other.
- Reconciliation File allows you click Open
File
 to load an XML
file that defines the mapping of elements shown in the Task copy across
controllers dialog box. Mappings currently defined in the dialog box
can be saved to an XML file by clicking Save Changes
to load an XML
file that defines the mapping of elements shown in the Task copy across
controllers dialog box. Mappings currently defined in the dialog box
can be saved to an XML file by clicking Save Changes
 .
.

- Tasks lists all tasks associated with the selected source
resource. By default, all tasks are selected. You can clear the selection in the
Selection column for any task to exclude it from the
copying process.
- Motion Groups provides a list of the motion groups
available under the Target resource to map the
Source motion group to.

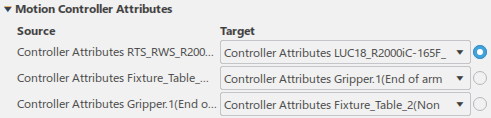
- For each Source set of controller attributes,
Motion Controller Attributes provides a corresponding list
of Target controller attributes that are available under the
selected motion group to map to.
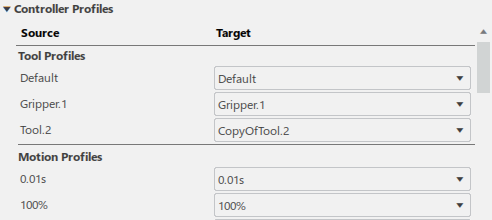
- For each Source tool and motion profile,
Controller Profiles provides a list of corresponding
profiles under the Target motion controller attribute that
are available to map to.
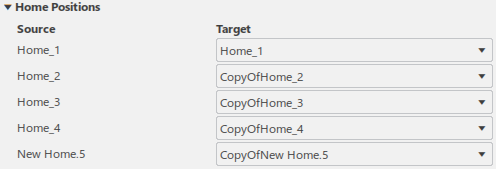
- For each home position defined under the source motion controller, Home
Positions provides a list of corresponding home positions under the
Target motion controller attribute that are available to
map to.
- Targets allows you to specify whether trajectories are
copied, and select the reference used for their creation.
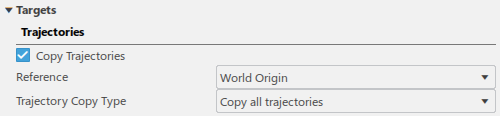
Select Copy Trajectories to copy the trajectories that are associated with the copied task.
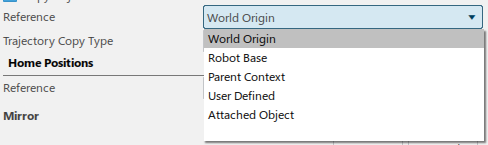
The Reference list allows you to select the reference used to create the copied trajectories.
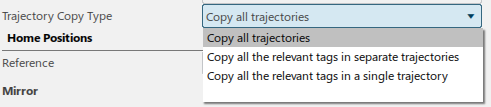
The Trajectory Copy Type list specifies how the associated trajectories are copied.
- Mirror provides the option to mirror the trajectories of the source task.
- Reconciliation File allows you click Open
File
- Optional:
In the Mirror section, select Mirror to
define how the copied trajectories are mirrored for the new task.
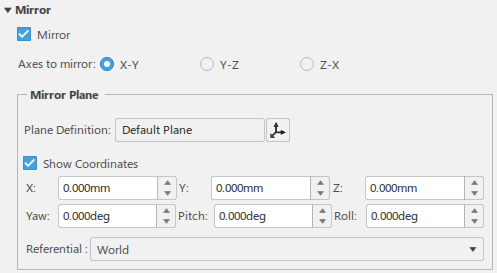
- Select an Axes to mirror to define the axes upon which the mirror occurs.
-
To specify a different plane for Plane Definition, click
 and identify a
location to specify the plane.
Once a plane has been specified, the mirrored tags appear.
and identify a
location to specify the plane.
Once a plane has been specified, the mirrored tags appear.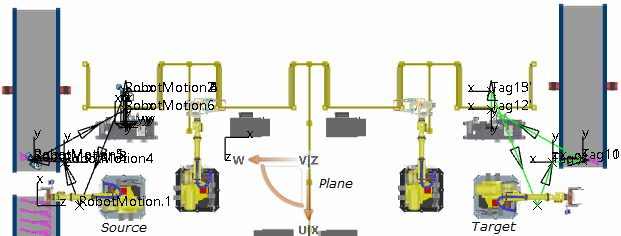
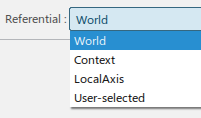
-
Select the Referential upon which the location is based.
For more information on mirroring trajectories, see Mirroring Trajectories and Robot Tasks in the Related Topics section of this page.
-
Click OK to replicate the task on the target device.
The new task appears in the Behavior side tab.
