Creating a Grab Activity | |||
| |||
- Click
Create
Grab Activity
 in the Material Handling toolbox.The Grab Activity panel appears.
in the Material Handling toolbox.The Grab Activity panel appears. - Select the Mode to use for the grab activity:
- If you select Product Buildup mode:
- In a resource simulation scenario, select a product in the work area implemented by planning data or a planning operation in the Behavior side tab.
- In an early validation scenario, select a product in the work area implemented by manufacturing item data, or a functional process/manufacturing assembly in the tree.
- As products are selected, they are added to the Grabbed Objects list. Each object specifies a Role for product build up, where:
- Concerned Products grabs all of the products managed by a selected operation.
- Input grabs all of the input to a selected operation.
- Output grabs all of the output of a selected operation.
- If you select Pick and Drop mode:
- Select the Mechanical Port of the Grabbing Object according to which the product(s) will move.
- Select the product(s) to grab in the work area or tree.
Products are populated in the Products table as they are selected.
Note: To remove a product from the list, select it in the table and click .
.
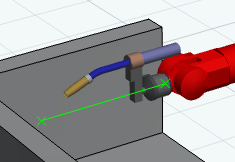
- If you select Sensor Detection mode,
- Select a simulation sensor that is defined for the currently programmed resource. This sensor is used to detect the parts to grab.
After a simulation sensor has been selected, its beam is displayed in the work area.
- Select the type of entity to detect. You can select from workpieces that are generated by a source, or any product (whether it is a workpiece or not).
- Select a simulation sensor that is defined for the currently programmed resource. This sensor is used to detect the parts to grab.
- If you select Product Buildup mode:
- Click
 to create the grab activity as defined.
to create the grab activity as defined. 