Linear Motion Among a Small Set of Targets
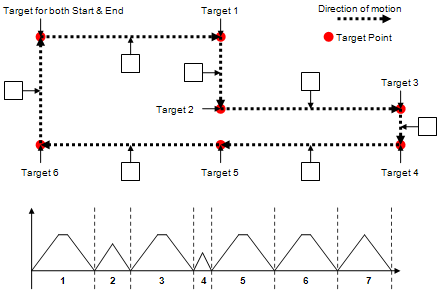
- The non-continuous (non-flyby) case
- The motion starts and ends at every target (that is, it briefly
stops at each target). For each motion segment, you can see the
corresponding motion profile. For smaller moves, the
maximum velocity is not reached. Only acceleration and
deceleration is done.
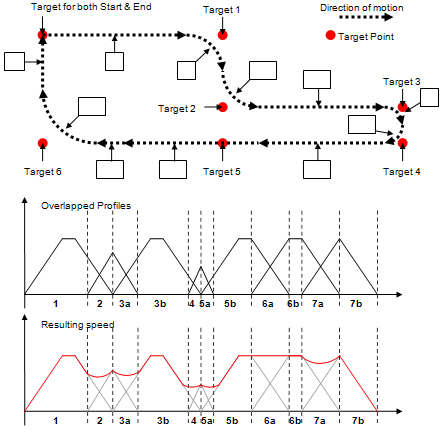
- The continuous motion (flyby) case
- The motion profiles are overlapped so that the motion to the next
target can start earlier. In the figure below:
- For Motions 1, 3b, 5b, 6b and 7b, the robot moves along the regular
trajectory (same as non-continuous case).
- For Motions 2, 3a, 4, 5a, 6a and 7a, the motion is a result of
motion profile overlapping. This shortens the motion time, and,
as a side effect, deviates off the path (except for motion 6a
where all targets are collinear).
Since there are a few direction changes along the path, the
resulting speeds slow down slightly during the overlap.
Circular Motion
This technique is independent of the type of motion that
is used (i.e., linear, circular, joint), but employs trapezoidal profiles (to overlap
consecutive deceleration and acceleration times).
- Three consecutive circular moves
- The following image shows both continuous and non-continuous motion
for three consecutive moves.

- Linear to circular motion
- There is nothing specific when transitioning from linear to circular
motion.
