You can mirror existing trajectories and robot tasks.
Mirroring
can be used when two robots are performing the same motions from different locations. When
targets are configured for one robot, you can create a mirrored copy of those targets and assign
them to another robot.
Before you begin:
You must have an existing task defined to mirror.
From the Setup section of the action bar,
click Mirror Targets.
You are prompted to select one or more objects to mirror.
In the work area,
select one or more trajectories to be mirrored.
You can select multiple trajectories by pressing the Ctrl
key as you make each selection. After all selections have been made, click
Finish in the
Tools Palette dialog box to end the selection process.
You can alternatively select a robot. All trajectories associated with the robot
are selected for mirroring.
The Mirror dialog box appears.
Click to
view the selected trajectories.
The Select objects to mirror dialog box appears.
All tags
from each trajectory are listed. By default, all tags are selected for mirroring. You
can clear the selection for specific tags in the Selected column
to exclude those tags from being mirrored.
Trajectory
Context and Trajectory Name indicate the parent and
name of the source trajectory, respectively. Result Context and
Result Trajectory indicate the parent and name of the mirrored
trajectory that is created.
Remove can be used to
permanently exclude selected trajectories or tags from the mirroring
process.
Click OK to return to the Mirror dialog
box.
Select an Axes to mirror.
Only the selected axes are mirrored. X-Y Mirroring Y-Z Mirroring Z-X Mirroring
In the Mirror section, Plane Definition
specifies the Default Plane. To specify a different plane, click and identify a
location to specify the plane.
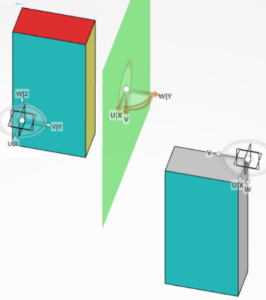
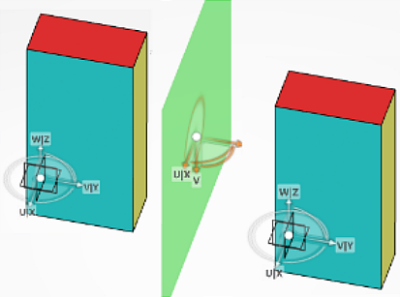
Upon selecting the plane, you can use the handle to place the mirrored trajectories to
the required location.
In the Results section, you can elect to
Move or Copy the selected trajectories
under a parent that you specify.
You can use the current parent, or click to select a parent in the tree or work area.
Under Parent is updated with your selection.
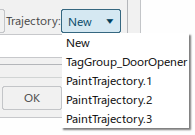
Trajectory lists all of the trajectories under the
specified parent. By default, New is selected. This moves a
mirrored trajectory from its original parent to the specified parent. If you select any
other trajectory in the list, the mirrored trajectory is appended in that trajectory.
When Copy is selected, you also have the option to
select and define a Name-Prefix that prepends the trajectory
name.
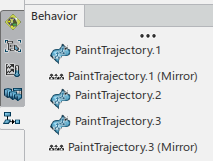
Click OK to create the mirrored task.
The new mirrored trajectories appear in the Behavior panel.
 .
You are prompted to select one or more objects to mirror.
.
You are prompted to select one or more objects to mirror.
 in the
Tools Palette dialog box to end the selection process.
in the
Tools Palette dialog box to end the selection process.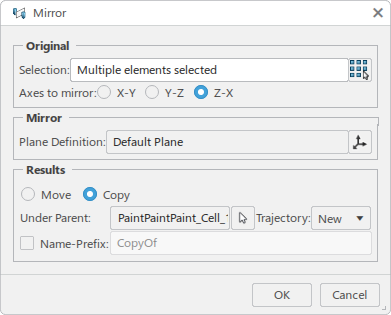
 to
view the selected trajectories.
The Select objects to mirror dialog box appears.
to
view the selected trajectories.
The Select objects to mirror dialog box appears.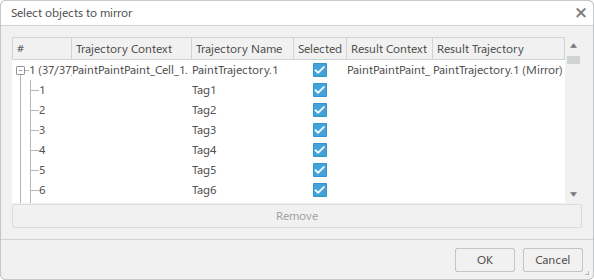

 and identify a
location to specify the plane.
and identify a
location to specify the plane.

 to select a parent in the tree or work area.Under Parent is updated with your selection.
to select a parent in the tree or work area.Under Parent is updated with your selection.