Programming Multiple Coordinated Robot Systems (MCRS) | |||
| |||
-
From the Programming section of the action bar, click New Device Task
 .
.
- In the work area, select the device that the new task will be assigned to.
 The Create Task as Service dialog box appears.
The Create Task as Service dialog box appears. - From the Create Task as Service dialog box, you can:
- Enter a Task Name for the new task, or use the default name provided.
- Select Create Task as Service to create a task that is not local to the selected resource and can be called in the organizational resource.
- Select Select Motion Groups
 to expand the dialog box and view a list of all possible motion groups under the
controller that can be assigned to the task. Note: If only a single motion group exists, this feature does not appear.
to expand the dialog box and view a list of all possible motion groups under the
controller that can be assigned to the task. Note: If only a single motion group exists, this feature does not appear.Motion groups can be assigned or unassigned by selecting the Assigned cell for each respective motion group in the list.
Assigned motion groups can be re-ordered by selecting a motion group and using Move up
 or Move down
or Move down
 to move it to the desired location. Note: Move up and Move down have no effect on unassigned motion groups.
to move it to the desired location. Note: Move up and Move down have no effect on unassigned motion groups.The first motion group in the list is the primary motion group (leader). The remaining motion groups are secondary (follower).
The Task column lists the tasks for the motion groups. You can select existing tasks for each of the motion groups. Tasks for assigned motion groups are then used to create a single task.
Tasks that manage multiple motion groups can be authored using teach.
-
Click Create Task
 to create the task.
The task appears in the Behavior panel of the browser.
to create the task.
The task appears in the Behavior panel of the browser. -
Click Teach
 to open the Teach panel.
Teach opens the new task, and the context toolbar appears.
to open the Teach panel.
Teach opens the new task, and the context toolbar appears. -
Select Insert an MCRS operation
 from the context toolbar.
A new MCRS operation appears under the task in the Teach panel.
from the context toolbar.
A new MCRS operation appears under the task in the Teach panel. -
You can now define an activity for each motion group under the current MCRS operation (robot motion, arc activity, spot activity, etc.)
The new activities appear under the current MCRS operation.
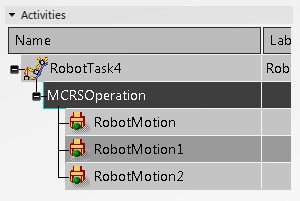
Each row under an MCRS operation represents a motion group managed by the task. Attributes for each activity are displayed in columns (Motion Group, Status, Type, Synchronization Mode, etc.).