Using MT Jog | |||
| |||
-
Click MT Jog
 .
.
You are prompted to select a robot.
-
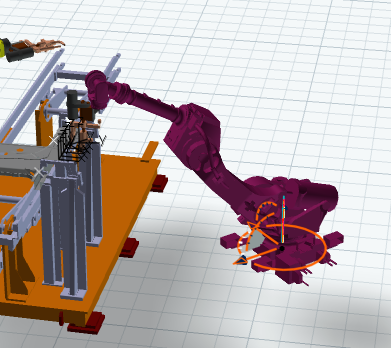
Jog the robot.
If the target tag becomes unreachable, the robot changes color.
 Notes:
Notes:- When a tag is selected, you can uncheck MT-Jog and perform normal jogging functions.
- If multiple robots are paired with a same tag, all paired robots will try to reach the moving tag.
- If another robot is selected, the previously selected robot's Jog dialog box is hidden and the currently selected robot's Jog dialog box appears.
- If multiple robots are selected and paired with respective tag points that are under a product, the orientation Robot is snapped to the selected product. Moving the product with the orientation Robot causes all of the participating robots are tracking their respective moving targets.
- Click Close in all Jog dialog boxes, or select MT Jog again to exit the command.Any modified positions of products, devices, or weld tags are saved.