-
From the Setup section of the action bar, click Export
Trajectory
 . .
The Export Trajectory dialog box appears. 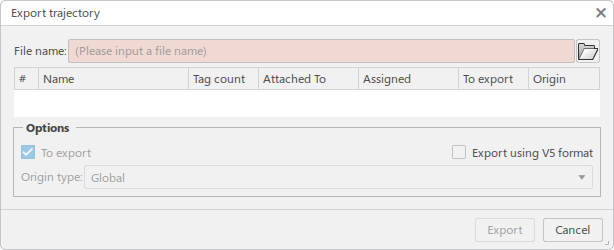
-
Select trajectories or a robot that has associated trajectories.
The related trajectories appear in the list.  -
In the Options section, To export is
selected by default for trajectories in the list. You can select specific trajectories in
the list and clear To export to avoid exporting them.
-
Select Export using V5 format to export the trajectories in the
V5 format.
Note that all trajectories can be exported either in V5 format or in 3DEXPERIENCE
format. You can not combine both V5 and 3DEXPERIENCE
formats in a single instance of Export Trajectory.
-
Select the Origin type for each trajectory to be exported.
Each trajectory can be exported with its own reference (Origin type) by selecting the
trajectory in the list and selecting the reference from the Origin
type list. Choose from the following types:
- Global
- Owner
- Attached Object
- User-defined
- Robot base
The Origin status is updated in the trajectory list.
-
In the File name section, click to
 open the Select a
file location dialog box. open the Select a
file location dialog box.
-
Navigate to the folder where you want to save the exported trajectories.
-
Enter a name for the file to save.
-
Click Save to close the dialog box.
The path and file name appear in the dialog box:  -
Click Export to export the trajectories and close the
Export trajectory dialog box.
Exported trajectories are saved in the following format:
| TagGroup Name : |
ArcTrajectory.1 |
Reference : |
Global |
|
|
|
|
|
| Tag Prefix |
Tag Index |
Tag Suffix |
X(mm) |
Y(mm) |
Z(mm) |
Yaw(deg) |
Pitch(deg) |
Roll(deg) |
| A |
1 |
|
13055.37357 |
5906.800605 |
118.671609 |
-7.47954 |
-19.679338 |
88.587116 |
| W |
1 |
|
13058.14087 |
5913.41219 |
100 |
-7.47954 |
-19.679338 |
88.587116 |
| W |
2 |
|
12877.6981 |
5946.600488 |
100 |
-7.47954 |
-19.679338 |
120.599619 |
| W |
3 |
|
12831.16268 |
5861.642687 |
100 |
-7.47954 |
-19.679338 |
-125.595675 |
| W |
4 |
|
12958.94301 |
5718.50229 |
100 |
-7.47954 |
-19.679338 |
-102.425363 |
| W |
5 |
|
13081.20347 |
5635.516827 |
100 |
-7.47954 |
-19.679338 |
-98.158685 |
| W |
6 |
|
13192.42191 |
5513.888307 |
100 |
-7.47954 |
-19.679338 |
-129.746466 |
| W |
7 |
|
13150.36931 |
5359.921152 |
100 |
-7.47954 |
-19.679338 |
162.108256 |
| W |
8 |
|
12976.68038 |
5267.634819 |
100 |
-7.47954 |
-19.679338 |
129.715757 |
| W |
9 |
|
12837.77249 |
5256.607809 |
100 |
-7.47954 |
-19.679338 |
104.438027 |
| W |
10 |
|
12687.13401 |
5307.78839 |
100 |
-7.47954 |
-19.679338 |
101.297917 |
| W |
11 |
|
12556.56954 |
5242.351445 |
100 |
-7.47954 |
-19.679338 |
-176.579503 |
| W |
12 |
|
12479.067 |
5103.838671 |
100 |
-7.47954 |
-19.679338 |
-143.873489 |
| D |
1 |
|
12485.9957 |
5105.672862 |
118.671609 |
-7.47954 |
-19.679338 |
-143.873489 |
| TagGroup Name : |
ArcTrajectory.2 |
Reference : |
Global |
|
|
|
|
|
| Tag Prefix |
Tag Index |
Tag Suffix |
X(mm) |
Y(mm) |
Z(mm) |
Yaw(deg) |
Pitch(deg) |
Roll(deg) |
| A |
1 |
|
10979.49325 |
4526.870436 |
24.386796 |
-7.654565 |
-43.463947 |
154.337843 |
| W |
1 |
|
10968.35652 |
4535.176656 |
10 |
-7.654565 |
-43.463947 |
154.337843 |
| W |
2 |
|
10968.35652 |
4345.176656 |
10 |
-7.654565 |
-43.463947 |
154.337843 |
| W |
3 |
|
10968.35652 |
4155.176656 |
10 |
-7.654565 |
-43.463947 |
154.337843 |
| W |
4 |
|
10968.35652 |
3965.176656 |
10 |
-7.654565 |
-43.463947 |
154.337843 |
| W |
5 |
|
10968.35652 |
3775.176656 |
10 |
-7.654565 |
-43.463947 |
154.337843 |
| W |
6 |
|
10968.35652 |
3585.176656 |
10 |
-7.654565 |
-43.463947 |
154.337843 |
| D |
1 |
|
10979.49325 |
3576.870436 |
24.386796 |
-7.654565 |
-43.463947 |
154.337843 |
|