Ergonomics at Work File-based Design Import | ||
| ||
V5 to 3DEXPERIENCE Data Import Table
The following table describes import correspondences between V5 file-based data and 3DEXPERIENCE content. some Ergonomic entities from previous versions cannot be imported into 3DEXPERIENCE.
The statuses for import results are fully imported, partially imported, and not imported (-).
| V5 Data Type | 3DEXPERIENCE Content Type | Import Result | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| The Plant Layout app provides a way to create a layout of a plant and an area for your manikins to walk on. In V5, all walk activities were defined in terms of a Plant Layout app. | The AEC Plant workshop is no longer present, and consequently, the feature to create an area is also not present, and V5 areas cannot be migrated. |
Not imported. In its place, a footprint is used to define an area for human resource and its walk activities. Now you can create a footprint using the Plant Layout app. |
||||||||||||
| Climb activities (climb ladder & climb stair) | They are imported as a Gesture activity. The climb activities contain Move to Postures which are imported as postures inside the Gesture activity | Imported. | ||||||||||||
| Activities under Human Activity Group (HAG) |
|
Imported. They are imported as macro activities. If the HAG contains a combination of several cases, they are imported as appropriate macro activities. If the HAG contains only MTPs, they are imported as a single GESTURE. If the HAG contains Walk activity, it is imported as a GOTO activity. |
||||||||||||
| Call Tasks |
A Human Call Task is imported as a separate human task and a run instruction is automatically created inside the main calling human task. In this scenario a run instruction to the called task, HumanTask.2 is created inside the parent task, Human Task.1. HumanTask.1
|
Imported. | ||||||||||||
|
Operate (walking/standing/reverse operate)
Track Line Track Trajectory |
Not supported. | Not imported. | ||||||||||||
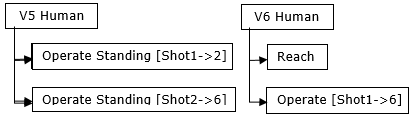
Import of Operate Activities |
|
| ||||||||||||
| Import of Operate Walking Activity (Device Moves) | Same as above. The walk stride will not be same as in V5 since the stride length no longer depends on the time of operate ('baby steps' issue of V5 is resolved in V6). The part on the device that has to be tracked will be taken from the V5 activity using the method GetTrackedObject from the DNBIOperateWalking API (DNBHumanSimInterfaces\PublicInterfaces) | |||||||||||||
| Import of Operate Walking Activity (defined for Tracks) | Not supported in V6 yet. Walk is only supported for Operate Device (V6) and not in Operate Part. | |||||||||||||
| Import of Reverse Operate Activities (standing and walking) | Not supported. Existing V6 activity will be first enhanced to facilitate reverse operate and then plans for migration will be published. |


Considerations
You should take the following considerations into account:
- Import of Plane Based Walk
- The human location and orientation are created under the product owning the walk plane. The position and orientation information are taken from the final posture in V5 (i.e., position from the last spline point and the manikin's X-axis direction from the last posture).
- Import of Non-Plane Based Walk
- The Human location and orientation are created under the first logical parent of the manikin resource. The position that is projected on walk plane and the orientation information projected on walk plane is taken from the final posture of the walk activity in V5.
- Import of Rule-Based Walk
- The human location and orientation is created under the first logical parent of the manikin resource. The position and orientation information projected on walk plane is taken from the final posture of the walk activity in V5. Since there is no rule based walk now, the walk type is set appropriately.
- Import of Auto Walk
- The human location and orientation is created under the first logical parent of the manikin resource. The position and orientation information is taken from the bounding MoveToPosture of the auto-walk in V5. If the start bounding MoveToPosture is not defined, the current location of the manikin is taken as the starting point for GOTO activity now.
- Importing a Pick Activity
- Using the import command, you can import V5 files and save them into the database. The Pick activity is imported as a GET activity and is created accordingly. In the GET activity, the interaction phase is populated with the information of the V5 pick activity (single, double handed pick, etc). By default, a Disk human interface is created and attached to the object to be using the GET. The position of the human interface is obtained from the final hand position (in V5, taking the offsets into account). After import, the GET activity contains Reach and Grasp (named as pick) motion elements.
GET
- Reach
- Pick.1
Constraints under the pick activity get migrated to the interaction skill relationship of hands with the Human interface created. If the object is moved slightly, the skill resolution makes sure that it is still picked correctly.
- Importing of a Place Activity
-
The place activity is imported as a PUT activity. In the PUT activity, only the Place motion element is populated with the information of the V5 Place activity. The PUT activity does not support multiple objects. Therefore, if the V5 place activity has multiple objects, as many PUT activities are created.
PUT
- Place.1
- Human Tasks
-
This allows you to import V5 Human Tasks and Move To Postures defined inside a CATProcess document into a session. Using the import command, you can import V5 files and save them into the database. The Human tasks in a V5 process document are migrated. The only children of a human task that are migrated are the Move to Postures.
- Move to Posture Activity
- MTPs are created as children under the GESTURE activity and parented under the same logical resource as the robot task. Process flow between MTPs are migrated. Multiple consecutive activities are migrated as postures under one GESTURE activity
- Grab/Release Activities
- Grab/Release activities inside OPERATE will not be saved to a Library.
- Library Search Dialog box
-
Skill libraries were displayed in this search. Now Attribute libraries are also listed.