Human Reference Frame
Here is a description of the human reference frame.
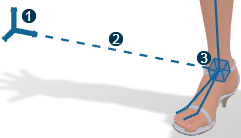
The reference frame (1) is the origin (0,0,0) of the 3D representation. It can be considered as a virtual root of the human skeleton.
The offset (2) is the distance between the origin of the reference frame and its corresponding child joint (3).
When you instantiate a human in a context, you can place and manipulate the human regarding the origin (reference frame).
The reference frame is always the same for all postures of a human. On the contrary, you can freely refine the offset for each posture.