About Incidents and Warnings | ||
| ||
Diagnosis Incidents Checked Before Simulation Computation
There are two different types of diagnosis incidents checked before the simulation computation begins:
- Sag diagnostic: The real shape of a part used by the 3DEXPERIENCE is a polygonal approximation. The parameter defining the approximation level is the sag or chordal deviation. This sag is the distance between the ideal shape of the part and its real computing shape. You can set the sag using Me > Preferences > Display > Performance.
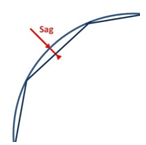
In case of contacts detection, you specify a
Penetration Maxparameter beyond which there is contact. Then, whenPenetration Max < 2 x Sag, an incident error is raised. The two values will be remembered in an error message. If this error occurs, choose a larger maximum penetration value or a smaller sag using Me>Preferences>Visu>Perfo Functionnality. - Knowledge Relation diagnostic: If knowledge relation involved in the excitations are deactivated, broken or cannot be evaluated, an incident error is raised.
Diagnosis Incidents Occurring During Simulation
During the simulation, the dynamics solver can raise warnings and errors. An error stops the simulation.
| Messages - Explanation | Workaround | Type |
|---|---|---|
Null inertia. Null inertia is supported if objects are linked to other objects with inertia. | - | Warning |
Clash at initial position. Bad results can be returned in that case. It indicates that there is a contact (with a penetration greater than the max depth tolerance) at the initial position of the simulation, which can generate simulation problems. | Solve the contact before starting the simulation. | Warning |
Joints with the user defined tolerances are broken. The angular and linear solver tolerances for the joints have been overtaken and the joints are broken. | Choose a smaller time step for a sharper solution. | Warning |
| No solution can be found. | - | Error |
| A solution was found but the friction in contact is not taken into account. | - | Warning |
A variable of the expression is not linked to a parameter of the dynamics. The expression cannot be processed. | - | Error |
No solution found for collision in quasi-static kinematics. | - | Error |
The current | Choose a smaller time step for a sharper solver solution or choose a greater Max depth penetration. | Warning |
Contacts cannot be handled. The objects are simulated without considering the contacts. | - | Warning |
Inconsistency between the position and the expression to control the position. | Fix the expression or change the part position. | Error |
Presolve failed. Can be due to inconsistencies between motors. | Check the consistency of the different laws of the scenario excitations. | error |
Max Force/Torque has been reached and exceeded. | Choose a greater Max Force/Torque. | Warning |
| The kinematics simulation is locked. The simulation cannot reach the next time step. | - | Error |
| The kinematics simulation is locked. The simulation cannot reach the next time step because of unsolved contacts. | Check the defined contacts. | Error |
| The constraint solver is unable to reach the command value because of contacts. | Check the defined contacts. | Error |
| The constraint solver is unable to reach the command value. | - | Error |
| Constraints are not satisfied at the initial position. Can be due to inconsistencies between the part positions and the constraints. | Check the consistency of the different constraints and update the assembly. | Error |