Defining a Part Position | |||
| |||
-
Right-click an operation that has implement links to items and select
 .
Note: If you select an operation that does not have implement links to items, you can select items directly in the tree.The Define Part Position dialog box appears, which lists the implemented items.
.
Note: If you select an operation that does not have implement links to items, you can select items directly in the tree.The Define Part Position dialog box appears, which lists the implemented items.The Robot is attached to the product assigned to the first item. A context toolbar is also displayed.
-
If required, use the commands of the context toolbar:
- Cumulative Snap
 : You can select
any geometric element from the selected product and snap it to other geometric elements
of the other products. All the selected products move to the new position.
: You can select
any geometric element from the selected product and snap it to other geometric elements
of the other products. All the selected products move to the new position. - Attach/Detach
 /
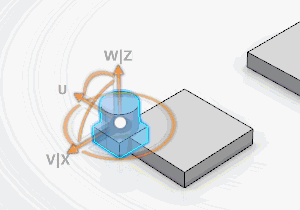
/ : On launching the
command, the Robot is snapped to the center of the first selected product in attached mode. To modify
the position of the selected products, you can move the Robot to any position. All the selected products simultaneously move relative to the Robot. In attached mode, the Robot is colored orange.
: On launching the
command, the Robot is snapped to the center of the first selected product in attached mode. To modify
the position of the selected products, you can move the Robot to any position. All the selected products simultaneously move relative to the Robot. In attached mode, the Robot is colored orange.If you want to put the Robot in a different location, you must detach the Robot from the product. You can then place the detached Robot anywhere in the work area without moving the products. In detached mode, the Robot is colored gray.
- Restore Position
 : You can restore the position of the selected products to their
design position relative to the root product.
: You can restore the position of the selected products to their
design position relative to the root product. - Activate/Deactivate Dynamic Clash
 :
When dynamic clash is enabled, you can detect if the defined position is in collision
with the environment when the objects are moved using the Robot.
:
When dynamic clash is enabled, you can detect if the defined position is in collision
with the environment when the objects are moved using the Robot.
- Cumulative Snap
-
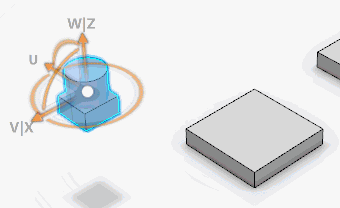
Use the Robot to position the products assigned to the items.
-
Click OK
 in the context toolbar to define the part position.
in the context toolbar to define the part position.
-
Click Play
 in the Compass to simulate the system.
The part position is taken into account in the simulation.
in the Compass to simulate the system.
The part position is taken into account in the simulation.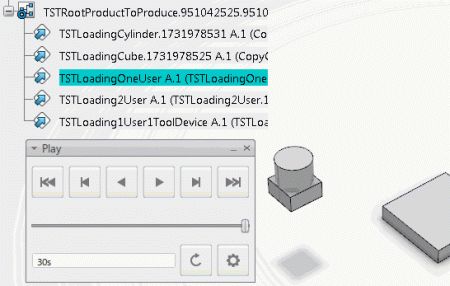
Tips:
|