Creating Mechanical Ports | ||
| ||
- Click Mechanical Port
 and select the resource on which you want to create the port. The Create Mechanical Port dialog box appears, asking:
and select the resource on which you want to create the port. The Create Mechanical Port dialog box appears, asking:Would you like to create an Axis System?
- Click Yes.A context toolbar appears, as well as a plane selector, and the Robot.
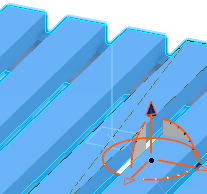
- Create an axis system by using Define Plane by Selecting Point / Axis / Circle Center
 (selected by default) and the plane selector.
(selected by default) and the plane selector.- Move the selector so that you have selected the desired plane.
- Click on the plane.The Robot snaps to the selector.
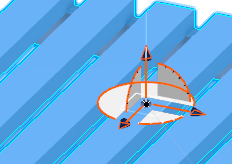
- Click Define New Orientation of X-Axis
 , and move the mouse over the content until you see a green line that shows the direction you want for the X-axis.The Robot shifts to show the next direction for the X-axis.
, and move the mouse over the content until you see a green line that shows the direction you want for the X-axis.The Robot shifts to show the next direction for the X-axis.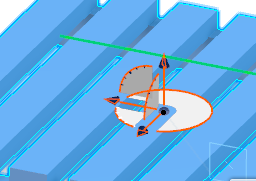
- Click Finish
 .You have created an axis system.
.You have created an axis system.
The Mechanical Port dialog box appears.
You can choose to create other types of mechanical ports from the Mechanical Port dialog box. If you have other axis systems created, you can select one of them for a mechanical port from the Mechanical Port dialog box.