Mapping V6 Resource IOs to RRS-II VRC IOs | ||
| ||
-
Fill in the Port Number field of the created Resource IO with its native name (as represented in the actual robot controller).
V6 RRS-II module parses this string to extract the integer embedded in it and uses this as the RRS-II IO number of that robot IO line when communicating with the VRC module.
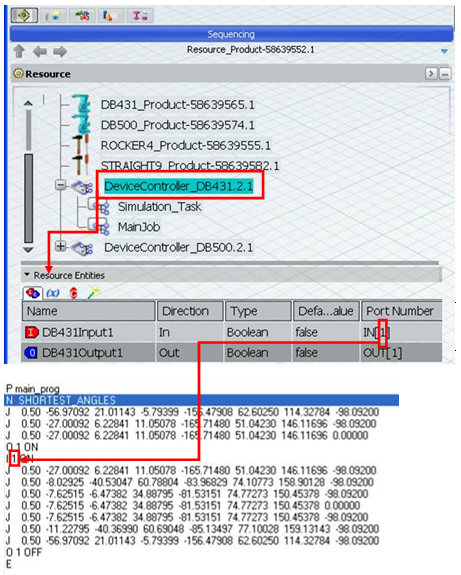
Important: Non-numeric characters in this field are ignored by the V6 RRS-II module. Hence, "IN15", "IN(15)", "INPUT[15]" are all valid port numbers that specify 15 as the RRS-II IO number of that robot IO line. The following example shows the RRS-II IO number embedded in a V6 Resource IO's Port Number field and the wait input command that is conditioned on that IO line turning ON in the robot's native program (that is executed by the VRC module).