A three-dimensional model can be created in
Abaqus/Standard
by:
revolving an axisymmetric model about its axis of revolution;
revolving a single three-dimensional sector about its axis of
symmetry; or
combining two parts of a symmetric three-dimensional model, where one
of the parts is the original model and the other part is obtained by reflecting
the original model through either a symmetry line or a symmetry plane.
The symmetric model generation capability can be used to create a
three-dimensional model by revolving an axisymmetric model about its axis of
revolution, by revolving a single three-dimensional sector about its axis of
symmetry, or by combining two parts of a symmetric model, where one part is the
original model and the other part is the original model reflected through a
line or a plane. The original model must have been saved to a restart file. The
symmetric model generation capability is not available for models defined in
terms of an assembly of part instances. Therefore, an element set name or a
node set name containing quotation marks is not supported.
An entire three-dimensional model—including nodes, elements, section
definitions, material and orientation definitions, rebar, and contact pair
definitions—is generated from the original model. Symmetric model generation
from a model with general contact is not allowed. You must redefine most types
of kinematic constraints (About Kinematic Constraints).
However, surface-based constraints (Mesh Tie Constraints)
and embedded element constraints (Embedded Elements)
defined in the original model will be generated automatically in the new
three-dimensional model. Changes made to the model as part of the history
data—element or contact pair removal/reactivation (Element and Contact Pair Removal and Reactivation)
or changes to friction properties (Changing Friction Properties during an Abaqus/Standard Analysis)—will
not be transferred to the new model. Such changes will have to be redefined in
the history data of the new model. All element and node sets defined in the
original model will be used in the new model. These sets will contain all of
the new elements and nodes that originated from the original sets.
Additional nodes, elements, contact surfaces, etc. can also be defined to
create parts of the model that were not specified in the original model. You
must ensure that the numbering of these nodes and elements does not conflict
with those used by the symmetric model generation capability. You can control
the node and element numbering in the new model (as described below for each
type of revolved model) so that you can define additional parts of the model
without the risk of conflicting element and node labels. The smallest
node/element number used in defining additional parts of the new model should
be greater than the largest node/element number generated by the symmetric
model generation capability.
Eliminating Duplicate Nodes
Duplicate nodes will be generated in certain situations. Such nodes can be
eliminated to ensure that the mesh is connected properly. Duplicate nodes can
be generated on the axis of revolution of a revolved model, on the connection
planes between sectors of a periodic model, and on the connection plane between
the two parts of a reflected model. You can specify the tolerance distance,
d, to be used in the search for duplicate nodes. The
default distance is 1.0% of the average element dimension. In some cases a
tolerance distance that is smaller than the default value needs to be specified
if, for example, the distance between two nodes on one of the connection planes
in the original sector of a periodic model is smaller than the default
tolerance distance. Closely spaced nodes elsewhere in the model, such as
between interface surfaces or on parts of the model that are generated with any
of the other model definition options, will not be eliminated.
Writing the New Model Definition to an External File
You can specify the name of an external file (without an extension) to which
the data for the new model definition will be written. The extension
.axi will be added to the file name provided. The file can
be edited to modify or to extend the model generated by
Abaqus/Standard.
Identifying the Restart Files
The symmetric model generation capability uses the restart
(.res), analysis database (.stt and
.mdl), and part (.prt) files from the
old model to generate the new model. The name of the restart files from the old
model must be specified when the new analysis is executed by using the
oldjob parameter in the command for
running
Abaqus
or by answering a request made by the command procedure (see
Abaqus/Standard and Abaqus/Explicit Execution).
Verifying the New Model
It is recommended that you verify the new model carefully before an analysis
is performed. The symmetric model generation capability requires only
information stored in the restart file during a data check run to generate the
new model, which allows you to verify the new model before the analysis of the
original model is performed. A data check analysis is performed by using the
datacheck parameter in the command for
running
Abaqus
(see
Abaqus/Standard and Abaqus/Explicit Execution).
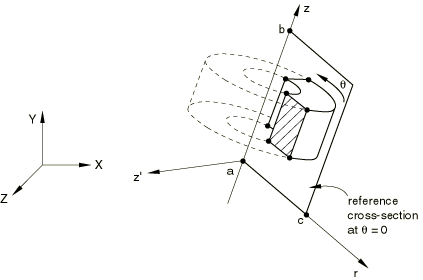
Revolving an Axisymmetric Cross-Section
You can create a three-dimensional model by revolving the cross-section of a
two-dimensional axisymmetric model about a symmetry axis starting at a
prescribed reference plane, .
Both the symmetry axis and reference plane of the new three-dimensional model
can be oriented in any direction with respect to the global coordinate system
(see
Figure 1).
A nonuniform discretization in the circumferential direction can be specified.
Revolving an axisymmetric cross-section.
Specify the coordinates of points a,
b, and c shown in
Figure 1,
followed by a list that defines the discretization in the circumferential
direction containing the segment angle, number of elements per segment, and the
bias ratio of the segment. Several segment angles, each with a different number
of element subdivisions and a different bias ratio, can be used to define the
complete discretization around the circumference of the revolved model. The
endpoint of a cross-section revolved through 360.0° will always be connected to
the origin of revolution, ,
regardless of the value specified for the duplicate node tolerance.
Local Orientation System
A local cylindrical orientation system is always used for element output of
stress, strain, etc. A default local orientation definition is provided if the
material in the original axisymmetric model does not contain an orientation
definition. This default orientation is defined with the polar axis of the
system along the axis of revolution, with an additional 90.0° rotation about
the local 1-direction so that the local axes are 1=radial, 2=axial, and
3=circumferential. If shells or membranes are used, the projections of the
local 2- and 3-axes onto the surface of the shell or membrane are taken as the
local directions on the surface. This orientation system is always provided,
even if an orientation is specified in the original axisymmetric model.
However, if the results of the axisymmetric analysis are mapped onto the new
three-dimensional model (see
Transferring Results from a Symmetric Mesh or a Partial Three-Dimensional Mesh to a Full Three-Dimensional Mesh)
and an orientation definition is associated with the material in the original
model, the original orientation revolved about the axis of symmetry replaces
this default orientation definition.
Controlling the New Node and Element Numbering
You can define the increments in numbers between each node and element
around the circumference of the three-dimensional model. The numbering starts
at the reference cross-section .
The reference cross-section uses the same numbering as the original
axisymmetric model. The defaults are the largest node and element numbers used
in the original axisymmetric model. Control over the numbering allows you to
define additional parts of the model without the risk of conflicting element
and node labels. Each offset value should be greater than or equal to the
maximum node or element label, respectively, used in the original model. When
specifying the offset value, care must be taken that the generated node or
element does not exceed the maximum value allowed, which is 999,999,999.
Correspondence between Axisymmetric and Three-Dimensional Elements
The element type used in the original two-dimensional model determines the
element type in the new three-dimensional model. You can specify whether the
new element should be either a general three-dimensional element or a
cylindrical element. General and cylindrical elements can be used in the same
model.
Regular axisymmetric elements (CAX), axisymmetric elements with twist (CGAX), shell elements, membrane elements, rigid elements, and surface
elements can be used in the two-dimensional model; however, nonlinear
axisymmetric elements (CAXA) cannot be used. A two-dimensional model that contains
incompatible mode elements; first-order, reduced-integration, continuum
elements; shell elements; or rigid elements cannot be used to generate
cylindrical elements. The correspondence between the axisymmetric element type
and the equivalent three-dimensional element type (general or cylindrical) is
shown in
Table 1.
Table 1. Correspondence between axisymmetric and three-dimensional (general and
cylindrical) element types.
Axisymmetric element
General three-dimensional element
Cylindrical element
ACAX3
AC3D6
CAX3
C3D6
CCL9
CAX3H
C3D6H
CCL9H
CGAX3
C3D6
CCL9
CGAX3H
C3D6H
CCL9H
CGAX3T
C3D6T
DCAX3
DC3D6
ACAX4
AC3D8
CAX4
C3D8
CCL12
CAX4H
C3D8H
CCL12H
CAX4I
C3D8I
CAX4R
C3D8R
CAX4RH
C3D8RH
CGAX4
C3D8
CCL12
CGAX4H
C3D8H
CCL12H
CGAX4R
C3D8R
CGAX4RH
C3D8RH
CAX4T
C3D8T
CAX4RT
C3D8RT
CAX4HT
C3D8HT
CAX4RHT
C3D8RHT
CGAX4T
C3D8T
CGAX4RT
C3D8RT
CGAX4HT
C3D8HT
CGAX4RHT
C3D8RHT
DCAX4
DC3D8
DCCAX4
DCC3D8
DCCAX4D
DCC3D8D
ACAX6
AC3D15
CAX6
C3D15
CCL18
CAX6H
C3D15H
CCL18H
CGAX6
C3D15
CCL18
CGAX6H
C3D15H
CCL18H
DCAX6
DC3D15
ACAX8
AC3D20
CAX8
C3D20
CCL24
CAX8H
C3D20H
CCL24H
CAX8R
C3D20R
CCL24R
CAX8RH
C3D20RH
CCL24RH
CGAX8
C3D20
CCL24
CGAX8H
C3D20H
CCL24H
CGAX8R
C3D20R
CCL24R
CGAX8RH
C3D20RH
CCL24RH
CAX8T
C3D20T
CAX8RT
C3D20RT
CAX8HT
C3D20HT
CAX8RHT
C3D20RHT
CGAX8T
C3D20T
CGAX8RT
C3D20RT
CGAX8HT
C3D20HT
CGAX8RHT
C3D20RHT
DCAX8
DC3D20
SAX1
S4R
DSAX1
DS4
SAX2
S8R
DSAX2
DS8
MAX1
M3D4R
MCL6
MGAX1
M3D4R
MCL6
MAX2
M3D8R
MCL9
MGAX2
M3D8R
MCL9
RAX2
R3D4
SFMAX1
SFM3D4R
SFMCL6
SFMGAX1
SFM3D4R
SFMCL6
SFMAX2
SFM3D8R
SFMCL9
SFMGAX2
SFM3D8R
SFMCL9
Limitations
First- and second-order elements cannot be used together in the
axisymmetric model.
Nonaxisymmetric elements such as springs, dashpots, beams, and trusses
will be ignored in the model generation.
Only surface-based contact pairs can be revolved. Models using general
contact cannot be revolved. Contact conditions modeled with contact elements
will be ignored in the model generation.
A two-dimensional model that includes incompatible mode elements;
first-order, reduced-integration, continuum elements; shell elements; or rigid
elements cannot be used to generate cylindrical elements.
Rebar with nonuniform spacing in the radial direction of an axisymmetric
element cannot be revolved.
Most types of kinematic constraints cannot be revolved. However,
surface-based constraints (Mesh Tie Constraints)
and embedded element constraints (Embedded Elements)
defined in the original model will be generated automatically in the new
three-dimensional model.
Only stress/displacement, heat transfer, coupled
temperature-displacement, and acoustic elements can be revolved.
Spatially varying fields defined using distributions (Distribution Definition) cannot be revolved.
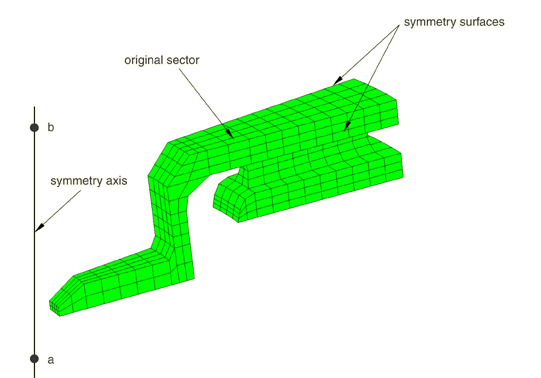
Revolving a Three-Dimensional Sector to Create a Periodic Model
You can create a three-dimensional periodic model by revolving a single
three-dimensional sector about a symmetry axis. Each generated sector in the
periodic model can span the same angle in the circumferential direction, such
as in a vented disc, or alternatively, can have a variable angle, such as in a
treaded tire. In both cases, each sector always has the same geometry and mesh.
Both the symmetry axis and the original three-dimensional sector can be
oriented in any direction with respect to the global coordinate system (see
Figure 2).
Mismatched surface meshes can be used between sectors. Both open (the structure
has end edges) or closed loop periodic structures can be generated. If a closed
loop periodic structure needs to be created, the sum of the segment angles over
all the sectors must be equal to 360°.
Revolving a three-dimensional sector to form a periodic model.
Defining a Periodic Model with a Constant Angle
To define a periodic model with a constant angle, you must specify the
coordinates of points a and b shown
in
Figure 2
to define the symmetry axis. You then define the segment angle,
(in degrees), of the original sector and the number of three-dimensional
repetitive sectors, N, including the original sector, in
the generated periodic model.
Defining a Periodic Model with a Variable Angle
To define a periodic model with a variable angle, the surfaces on both
sides of the original sector must be completely planar. You specify the
coordinates of points a and b shown
in
Figure 2
to define the symmetry axis. You then define the segment angle,
(in degrees), of the original sector and the number of three-dimensional
repetitive sectors, N, including the original sector, in
the generated periodic model. Next, you specify an additional number of
three-dimensional sectors to be generated, M, and the
angular scaling factor, f, in the circumferential
direction with respect to the original sector to be applied to these additional
sectors. You can define pairs of additional sectors and scaling factors as
needed.
Applying Constraints to Symmetric Surfaces with Mismatched Meshes
If the symmetric surfaces in the original sector have precisely matched
meshes, as shown in
Figure 3,
any duplicate nodes that are generated will be eliminated automatically to
ensure that the mesh is connected properly between the neighboring sectors when
revolving the original sector about the symmetry axis to create a periodic
model.
Surfaces with precisely matching meshes on the original
sector.
In all other cases you must define one or more pairs of corresponding
surfaces on each side of the original sector (see
About Surfaces)
in the original model and specify the pairs of corresponding surfaces in the
symmetric model generation definition.
Optionally, you can also specify the tolerance distance within which nodes
on one surface of a sector must lie from the corresponding surface of the
neighboring sector to be constrained. Nodes on the surface of the sector that
are further away from the corresponding surface of the neighboring sector than
this distance are not constrained. The default value for the tolerance distance
is 5% or 10% of the typical element size in the surfaces of the original
sector, depending on whether node-to-surface or surface-to-surface type
constraints are used, respectively.
You can also specify whether surface-to-surface (default) or node-to-surface constraints should
be used. Constraints between the automatically generated neighboring pairs of
corresponding surfaces are then applied with an automatically generated
surface-based tie constraint (Mesh Tie Constraints)
when revolving the original sector about the symmetry axis to create a periodic
model. The first surface of each specified pair is the secondary surface, and
all degrees of freedom of the nodes in the surface will be eliminated by
internally generated multi-point constraints.
Local Orientation System
A local cylindrical orientation system is always used for element output of
stress, strain, etc. If an orientation is specified in the original
three-dimensional sector (see
Orientations),
the orientation system in the new model is defined by revolving the original
orientation system about the symmetry axis. If shells or membranes are used,
the projections of the local 2- and 3-axes onto the surface of the shell or
membrane are taken as the local directions on the surface. If the material in
the original three-dimensional sector does not contain an orientation
definition, a default local orientation definition is provided. This default
orientation is defined by revolving the global coordinate system in the
original model about the axis of symmetry in the new model.
Controlling the New Node and Element Numbering
You can define the increments in numbers between each node and element
around the circumference of the three-dimensional model. The numbering starts
at the original three-dimensional repetitive sector. The original
three-dimensional repetitive sector uses the same numbering as the original
model. The defaults are the largest node and element numbers used in the
original model. Control over the numbering allows you to define additional
parts of the model without the risk of conflicting element and node labels.
Each offset value should be greater than or equal to the maximum node or
element label, respectively, used in the original model. When specifying the
offset value, care must be taken that the generated node or element does not
exceed the maximum value allowed, which is 999,999,999.
Limitations
Only surface-based contact pairs can be revolved. Models using general
contact cannot be revolved. Contact conditions modeled with contact elements
will be ignored in the model generation.
Most types of kinematic constraints cannot be revolved. However,
surface-based constraints (Mesh Tie Constraints)
and embedded element constraints (Embedded Elements)
defined in the original model will be generated automatically in the new
three-dimensional model. One exception is that surface-based ties for enforcing
cyclic symmetric constraints are not revolved.
Only stress/displacement, heat transfer, coupled
temperature-displacement, and acoustic elements can be revolved. Beam and frame
elements cannot be revolved.
Spatially varying fields defined using distributions (Distribution Definition) cannot be revolved.
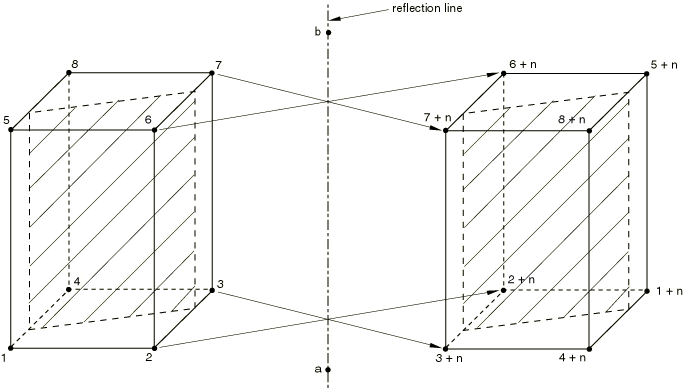
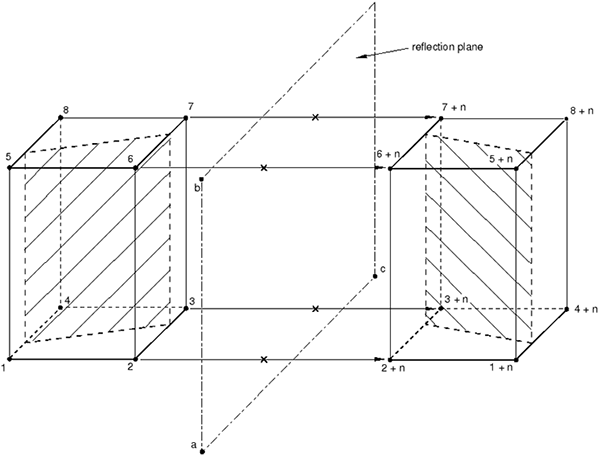
Reflecting a Partial Three-Dimensional Model
You can create a three-dimensional model by combining two parts of a
symmetric three-dimensional model. One of the parts is the original model, and
the other part is obtained by reflecting the original model through a symmetry
line (Figure 4)
or plane (Figure 5).
Specify the coordinates of points a,
b, and (if required) c shown in
Figure 4
and
Figure 5.
Reflecting a three-dimensional model through line
with node offset n. Reflecting a three-dimensional model through a plane
with node offset n.
Controlling the New Node and Element Numbering
You can specify constants that must be added to the original node and
element numbers for numbering the reflected part of the three-dimensional
model. The defaults are the maximum node and element numbers used in the
original model. Control over the numbering allows you to define additional
parts of the model without the risk of conflicting element and node labels.
Limitations
Only surface-based contact pairs can be reflected. Models using general
contact cannot be reflected. Contact conditions modeled with contact elements
will be ignored in the model generation.
You must ensure that main surfaces remain continuous after reflection. A discontinuous surface
is created when the surface in the original model does not intersect the
connection plane between the two parts of the symmetric structure.
Rigid surfaces cannot be reflected. The rigid surface definition of the
original model is simply repeated in the new model. You must, therefore,
specify the complete rigid surface in the original model.
Most types of kinematic constraints cannot be reflected. However,
surface-based constraints (Mesh Tie Constraints)
and embedded element constraints (Embedded Elements)
defined in the original model will be generated automatically in the new
three-dimensional model.
Only stress/displacement, heat transfer, coupled
temperature-displacement, and acoustic elements can be reflected.
Nonaxisymmetric elements such as springs, dashpots, beams, and trusses
cannot be reflected.
Spatially varying fields defined using distributions (Distribution Definition) cannot be reflected.