Solving nonlinear problems in
Abaqus/Standard
involves:
a combination of incremental and iterative procedures;
using the Newton method to solve the nonlinear equations;
determining convergence;
defining loads as a function of time; and
choosing suitable time increments automatically.
Alternative techniques to the standard Newton method are available. Some
static problems may become unstable because of severe nonlinearity.
Abaqus/Standard
offers a set of automatic stabilization mechanisms to handle such problems.
The nonlinear load-displacement curve for a structure is shown in
Figure 1.
Nonlinear load-displacement curve.
The objective of the analysis is to determine this response. In a nonlinear
analysis the solution cannot be calculated by solving a single system of linear
equations, as would be done in a linear problem. Instead, the solution is found
by specifying the loading as a function of time and incrementing time to obtain
the nonlinear response. Therefore,
Abaqus/Standard
breaks the simulation into a number of time
increments and finds the approximate equilibrium configuration
at the end of each time increment. Using the Newton method, it often takes
Abaqus/Standard
several iterations to determine an acceptable solution to each time increment.
Steps, Increments, and Iterations
The time history for a simulation consists of one or more
steps. You define the steps, which generally
consist of an analysis procedure, loading, and output requests. Different
loads, boundary conditions, analysis procedures, and output requests can be
used in each step. For example:
Step 1: Hold a plate between rigid jaws.
Step 2: Add loads to deform the plate.
Step 3: Find the natural frequencies of the deformed plate.
An increment is part of a step. In
nonlinear analyses each step is broken into increments so that the nonlinear
solution path can be followed. You suggest the size of the first increment, and
Abaqus/Standard
automatically chooses the size of the subsequent increments. At the end of each
increment the structure is in (approximate) equilibrium and results are
available for writing to the restart, data, results, or output database files.
An iteration is an attempt at finding an
equilibrium solution in an increment. If the model is not in equilibrium at the
end of the iteration,
Abaqus/Standard
tries another iteration. With every iteration the solution that
Abaqus/Standard
obtains should be closer to equilibrium; however, sometimes the iteration
process may diverge—subsequent iterations may move away from the equilibrium
state. In that case
Abaqus/Standard
may terminate the iteration process and attempt to find a solution with a
smaller increment size.
Convergence
Consider the external forces, P, and the
internal (nodal) forces, I, acting on a body (see
Figure 2(a)
and
Figure 2(b),
respectively). The internal loads acting on a node are caused by the stresses
in the elements that are attached to that node.
Internal and external loads on a body.
For the body to be in equilibrium, the net force acting at every node must
be zero. Therefore, the basic statement of equilibrium is that the internal
forces, I, and the external forces,
P, must balance each other:
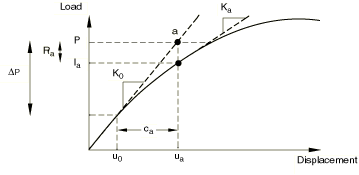
The nonlinear response of a structure to a small load increment,
,
is shown in
Figure 3.
According to the Newton method,
Abaqus/Standard
uses the structure's tangent stiffness, ,
calculated from its configuration at ,
and
to calculate a displacement correction,
,
for the structure. Using ,
the structure's configuration is updated to .
First iteration in an increment.
Abaqus/Standard
then calculates the structure's internal forces, ,
in this updated configuration. The difference between the total applied load,
P, and
can now be calculated as
where
is the force residual for the iteration.
If
is zero at every degree of freedom in the model, point a
in
Figure 3
would lie on the load-deflection curve and the structure would be in
equilibrium. In a nonlinear problem
will never be exactly zero, so
Abaqus/Standard
compares it to a tolerance value. If
is less than this force residual tolerance at all nodes,
Abaqus/Standard
accepts the solution as being in equilibrium. By default, this tolerance value
is set to 0.5% of an average force in the structure, averaged over time.
Abaqus/Standard
automatically calculates this spatially and time-averaged force throughout the
simulation. You can change this, and all other such tolerances, by specifying
solution controls (see
Convergence Criteria for Nonlinear Problems).
If
is less than the current tolerance value, P and
are considered to be in equilibrium and
is a valid equilibrium configuration for the structure under the applied load.
However, before
Abaqus/Standard
accepts the solution, it also checks that the last displacement correction,
,
is small relative to the total incremental displacement,
.
If
is greater than a fraction (1% by default) of the incremental displacement,
Abaqus/Standard
performs another iteration. Both convergence checks must be satisfied before a
solution is said to have converged for that time
increment.
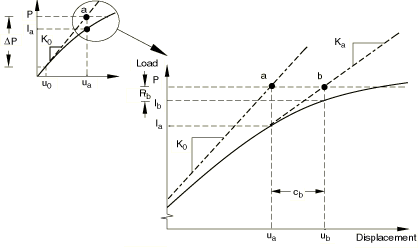
If the solution from an iteration is not converged,
Abaqus/Standard
performs another iteration to try to bring the internal and external forces
into balance. First,
Abaqus/Standard
forms the new stiffness, ,
for the structure based on the updated configuration, .
This stiffness, together with the residual ,
determines another displacement correction, ,
that brings the system closer to equilibrium (point b in
Figure 4).
Second iteration.
Abaqus/Standard
calculates a new force residual, ,
using the internal forces from the structure's new configuration,
.
Again, the largest force residual at any degree of freedom,
,
is compared against the force residual tolerance, and the displacement
correction for the second iteration, ,
is compared to the increment of displacement, .
If necessary,
Abaqus/Standard
performs further iterations. For more details on convergence in
Abaqus/Standard,
see
Convergence Criteria for Nonlinear Problems.
For each iteration in a nonlinear analysis
Abaqus/Standard
forms the model's stiffness matrix and solves a system of equations. Therefore,
the computational cost of each iteration is close to the cost of conducting a
complete linear analysis, making the computational expense of a nonlinear
analysis potentially many times greater than the cost of a linear analysis.
Since it is possible with
Abaqus/Standard
to save results at each converged increment, the amount of output data
available from a nonlinear simulation can also be much greater than that
available from a linear analysis of the same geometry.
Solution Method
Abaqus/Standard
by default uses the Newton's method to solve nonlinear problems iteratively
(see section
Convergence for a
description). In some cases it uses an exact implementation of Newton's method,
in the sense that the Jacobian or the stiffness matrix of the system is defined
exactly, and quadratic convergence is obtained when the estimate of the
solution is within the radius of convergence of the algorithm. In other cases
the Jacobian is approximated so that the iterative method is not an exact
Newton method. For example, some material and surface interface models (such as
nonassociated flow plasticity models or Coulomb friction) create a nonsymmetric
Jacobian matrix, but you may choose to approximate this matrix by its symmetric
part.
Alternative techniques to the standard Newton method are available. These
techniques attempt to reduce costs associated with assembly of the full
Jacobian and its subsequent factorization during every iteration in the Newton
method. The details of these techniques and the situations where they are
applicable to derive performance gains are described in the following.
Specifying the Quasi-Newton Method
You can choose to use the quasi-Newton technique for a particular step
(described in
Quasi-Newton solution technique)
instead of the standard Newton method for solving nonlinear equations.
The quasi-Newton technique can save substantial computational cost in some
cases by reducing the number of times the Jacobian matrix is factorized.
Generally it is most successful when the system is large and many iterations
are needed per increment or when the stiffness matrix is not changing much from
iteration to iteration (such as in a dynamic analysis using implicit time
integration or in a small-displacement analysis with local plasticity). It can
be used only for symmetric systems of equations; therefore, it cannot be used
when the unsymmetric solver is specified for a step (see
Defining an Analysis),
nor can it be used for procedures that always produce an unsymmetric system of
equations, such as
Fully Coupled Thermal-Stress Analysis
and
Abaqus/Aqua Analysis.
In addition, it cannot be used for a static Riks procedure (see
Unstable Collapse and Postbuckling Analysis).
The quasi-Newton method works well in combination with the line search
method (see
Improving the Efficiency of the Solution by Using the Line Search Algorithm).
Line searches help to prevent divergence of equilibrium iterations resulting
from the inexact Jacobian produced by the quasi-Newton method. The line search
method is activated by default for steps that use the quasi-Newton method. You
can override this action by specifying line search controls.
You can specify the number of quasi-Newton iterations allowed before the
kernel matrix is reformed. The default number of iterations is 8. Additional
matrix reformations may occur automatically during the iteration process
depending on the convergence behavior. Since quadratic convergence is not
expected during quasi-Newton iterations, the logarithmic rate of convergence
check is not applied during the time incrementation. Furthermore, the iteration
count used in the time incrementation is a weighted sum of quasi-Newton
iterations, with the weight factor depending on whether or not a kernel matrix
has been reformed.
The quasi-Newton solution technique is not available when the model contains
matrices included with the matrix input options.
Specifying the Separated Method
Alternatively, you can choose to use the separated technique instead of the
standard Newton method for solving nonlinear equations for fully coupled
thermal-stress and coupled thermal-electrical procedures.
The separated technique (described in
Fully Coupled Thermal-Stress Analysis
and
Coupled Thermal-Electrical Analysis)
approximates the Jacobian by eliminating interfield coupling terms and can save
substantial computational cost in cases where there is relatively weak coupling
between the fields.
Linear Complementarity Problem (LCP) Solution Technique for Solving Contact Problems
Contact problems in
Abaqus/Standard involve solving nonlinear equations in general
nonlinear steps. For each load increment, the active set of contact constraints
and corresponding contact stresses are solved for along with other solution
variables (typically) using Newton iterations. For structural problems
involving contact, an alternative solution technique is available under special
modeling assumptions listed below.
Contact can be modeled entirely
with the small sliding formulation with frictionless tangential behavior. Small
sliding can be specified with contact pairs or a nondefault setting with
general contact.
Symmetric stiffness matrix
storage is applicable.
Except contact, the rest of the
model response can be assumed to be linear.
Under these assumptions, the governing equations take the form of a set of
linear inequality constraints from contact (contact gap has to be either
positive or zero) along with a set of linear equations for equilibrium. The
resulting mathematical problem is known as the Linear Complementarity Problem
(LCP). The
LCP technique solves for unknown active
contact constraints and corresponding contact stresses together with
displacement unknowns during the solution process. This solution technique is
accessible only within a static perturbation step (see
Contact within Static Perturbation Analysis).
The linearization of material and geometric nonlinearities at the base state is
relied upon for ensuring linear response for the rest of the model
automatically while nonlinearities only due to contact status changes are
handled. Commonly, geometric nonlinearities are turned off as a modeling
assumption while using the LCP approach.
The LCP solution involves the following
phases. First, displacement degrees-of-freedom are condensed out and the
governing equations are written only in terms of unknown contact pressure
variables from potential contact constraints at the contact interfaces. The
potential constraints are determined based on gap/overclosure distances at the
base state prior to the LCP solution process.
The condensation phase is followed by an iterative process
(LCP iterations) to determine active contact
constraints and the corresponding contact pressure values. The displacement
solution is obtained from the contact pressure solution in a subsequent
recovery phase. Global stiffness matrix assembly and solving the global set of
equations during multiple nonlinear iterations in the traditional approach are
avoided, which makes the LCP approach more
efficient in some situations.
Specifying a Gap Distance to Control Potential Constraints Exposed to the LCP Solver
The number of potential constraints exposed to the
LCP solver can be controlled by a gap distance
that you specify. All closed contact constraints and those that are open and
within the gap distance in the base state are included as potential
constraints. By default, a gap distance is internally computed based on a
characteristic facet dimension associated with individual contact pairs. You
can also provide a scale factor to scale the gap distance that you specified or
the internally computed defaults. The choice of the gap distance affects
performance.
Choosing a conservative gap distance can rapidly increase the cost of the
LCP solver since such costs show a cubic
growth in the number of potential contact constraints. The
LCP solver can automatically revise the gap
distance while keeping a check on the number of potential constraints if it
finds that the initial choice of the gap distance is small and results in
overclosure violations. Therefore, it may not be necessary to be overly
conservative while choosing the gap distance.
Several examples are presented here for a better understanding of the
performance characteristics of the LCP
approach.
Figure 5
shows an example where a solid sphere is pinched between rigid plates. Linear
elastic material behavior is assigned to the sphere, while the small-sliding
formulation without friction is assumed for modeling contact. Geometric
nonlinearities are turned off. This model is set up so that both the
traditional and the LCP approaches are
expected to give the same final solution. Boundary conditions are applied to
push the top plate down in a static step for the traditional approach, and the
same conditions are prescribed within a static perturbation step in the
LCP approach. An initial guess of half the
boundary displacement is specified for the gap distance to include potential
contact constraints.
Pinching of a solid sphere solved with
LCP contact.
Table 1
compares normalized wall times between the traditional and the
LCP approaches for three different meshes for
the model in
Figure 5.
The LCP approach shows significant speedups in
this example.
Table 1. Performance comparison of LCP contact
with traditional contact for a pinched sphere.
Quantity
Coarse
mesh
Medium mesh
Fine mesh
LCP approach
Traditional approach
LCP approach
Traditional approach
LCP approach
Traditional approach
Normalized wall time (speed up factor for LCP)
1.0
5.0 (5.0)
27.8
193 (6.9)
187
1925 (10.3)
Number of global assembly and solve iterations
1
7
1
9
1
10
Number of LCP
iterations
134
Not applicable
492
Not applicable
1044
Not applicable
Model size
42,000
306,000
890,000
Number of potential contact constraints to
LCP solver
353
Not applicable
1496
Not applicable
3476
Not applicable
Active constraints from the solution
187
743
1696
Consider instead a grid of spheres in
Figure 6
made by assembling instances of the setup in the previous example. Three grids
with 10, 50 and 100 spheres are considered for comparison purposes in
Table 2.
These models more closely approximate an assembly of parts. The meshes on the
individual spheres correspond to the coarsest mesh in the previous example. The
rest of the model definitions remain the same. From
Table 2
it is clear that as the number of potential contact constraints increase, the
cubic growth of the cost of the LCP solver
starts to dominate. The performance degradation compared to the traditional
approach is rapid as the grid size increases and becomes unacceptable for the
50 to the 100 sphere models.
Pinching of multiple solid spheres.
Table 2. Performance comparison of LCP contact
with traditional contact for a grid of pinched spheres.
Quantity
Single
sphere
10 spheres
50 spheres
100 spheres
LCP approach
Traditional approach
LCP approach
Traditional approach
LCP approach
Traditional approach
LCP approach
Traditional approach
Normalized wall time (speed up factor for LCP)
1
5 (5.0)
25
54 (2.2)
2,064
358 (0.17)
14,492
553 (0.038)
Number of global assembly and solve iterations
1
7
1
7
1
7
1
7
Number of LCP
iterations
134
Not applicable
1214
Not applicable
6014
Not applicable
12014
Not applicable
Model size
42,000
420,000
2,100,000
4,200,000
Number of potential contact constraints to
LCP solver
353
Not applicable
3,530
Not applicable
17,650
Not applicable
353,00
Active constraints from the solution
187
1,870
9,350
18,700
Keep the following additional points in mind when using the
LCP approach:
The performance gains with the
LCP approach are problem dependent. In general, the
number of potential contact constraints exposed to the
LCP solver should be small compared to the overall
problem size. In addition, the performance of the LCP
solver can start to degrade when the number of potential constraints exceeds 10,000 as
seen in larger contact models. The LCP approach can
be beneficial if the Newton iterations using the traditional approach are expensive;
for example, if you are using the direct sparse solver, costs add up quickly when
dealing with a stiffness matrix from a blocky structure (see The Sparse Solver).
For various mesh sizes that result in small- to
medium-sized problems as in Table 1, direct solver costs in the traditional approach
tend to dominate the LCP costs. However, for an
assembly of components, the resulting stiffness matrix typically exhibits a higher
degree of sparsity. The direct sparse solver costs and, thereby, the Newton
iteration costs can be much smaller compared to a similarly sized blocky model. In
those cases, the traditional approach is usually more efficient.
The cost of
LCP iterations also depends on how far the
final solution for actual active constraints differs from the potential
constraints. For example, if the active contact constraints in the final
solution are a small subset of the potential constraints, more
LCP iterations are necessary to arrive at the
final solution than in a problem where the initial guess is close to the final
solution. On the other hand, if the initial gap distance is too small, the gap
distance may have to be revised and the set of potential constraints expanded.
The LCP iterations in this case are repeated
with the new set of potential constraints, thereby increasing the cost of the
LCP approach.
The
LCP iterations may have difficulty converging
in cases where the stiffness matrix in the base state shows ill-conditioning or
corresponds to instabilities. It is also necessary to ensure sufficient
boundary restraints to avoid stiffness matrix singularities in the base state.
To gain a better understanding
of solution accuracy and efficiency, you may choose to compare the solution to
the fully nonlinear problem with the solution from the
LCP approach for the types of problems you
want to solve. This ensures that ignoring various nonlinearities would still
provide an adequate solution. In traditional applications where nonlinear
effects and friction may be important, the modeling assumptions imposed by
LCP approach may be too restrictive for its
effective use.
Automatic Incrementation Control
By default,
Abaqus/Standard
automatically adjusts the size of the time increments to solve nonlinear
problems efficiently. You need to suggest only the size of the first increment
in each step of the simulation, after which
Abaqus/Standard
automatically adjusts the size of the increments. If you do not provide a
suggested initial increment size,
Abaqus/Standard
will attempt to apply all of the loads defined in the step in a single
increment. For highly nonlinear problems
Abaqus/Standard
will have to reduce the increment size repeatedly to obtain a solution,
resulting in wasted CPU time. It is
advantageous to provide a reasonable initial increment size because only in
mildly nonlinear problems can all of the loads in a step be applied in a single
increment.
The number of iterations needed to find a converged solution for a time
increment will vary depending on the degree of nonlinearity in the system. With
the default incrementation control, the procedure works as follows. If the
solution has not converged within 16 iterations or if the solution appears to
diverge,
Abaqus/Standard
abandons the increment and starts again with the increment size set to 25% of
its previous value. It then attempts to find a converged solution with this
smaller time increment. If the solution still fails to converge,
Abaqus/Standard
reduces the increment size again. This process is continued until a solution is
found. If the time increment becomes smaller than the minimum you defined or
more than 5 attempts are needed,
Abaqus/Standard
stops the analysis.
If the increment converges in fewer than 5 iterations, this indicates that
the solution is being found fairly easily. Therefore,
Abaqus/Standard
automatically increases the increment size by 50% if 2 consecutive increments
require fewer than 5 iterations to obtain a converged solution.
Nonlinear static problems can be unstable. Such instabilities may be of a
geometrical nature, such as buckling, or of a material nature, such as material
softening. If the instability manifests itself in a global load-displacement
response with a negative stiffness, the problem can be treated as a buckling or
collapse problem as described in
Unstable Collapse and Postbuckling Analysis.
However, if the instability is localized, there will be a local transfer of
strain energy from one part of the model to neighboring parts, and global
solution methods may not work. This class of problems has to be solved either
dynamically or with the aid of (artificial) damping; for example, by using
dashpots.
Abaqus/Standard
provides an automatic mechanism for stabilizing unstable quasi-static problems
through the automatic addition of volume-proportional damping to the model. The
applied damping factors can be constant over the duration of a step, or they
can vary with time to account for changes over the course of a step. The
latter, adaptive approach is typically preferred.
Automatic Stabilization of Static Problems with a Constant Damping Factor
Automatic stabilization with a constant damping factor is triggered by
including automatic stabilization in any nonlinear quasi-static procedure.
Viscous forces of the form
are added to the global equilibrium equations
where
is an artificial mass matrix calculated with unity density,
c is a damping factor,
is the vector of nodal velocities, and
is the increment of time (which may or may not have a physical meaning in the
context of the problem being solved).
For the case of static stabilization the mass matrix for Timoshenko beams is
always calculated assuming isotropic rotary inertia, regardless of the type of
rotary inertia specified for the beam section definition (Rotary Inertia for Timoshenko Beams).
Automatic stabilization does not carry over automatically to subsequent
steps. It needs to be declared for any step in which you want it to be active.
Abaqus/Standard
recalculates new values for the damping factor, based on the declared damping
intensity and on the solution of the first increment of the step. Therefore,
unless you specify the same damping factor directly (see
Directly Specifying the Damping Factor
below), an analysis with an unstable step may produce slightly different
results from the same analysis with the original step split into two steps.
Moreover, if the instabilities in the model have not subsided by the end of a
step, viscous forces may be terminated abruptly or modified at the beginning of
subsequent steps, potentially causing convergence difficulties if automatic
stabilization is not used in the subsequent step. If such a situation arises,
it is recommended that the problem be restarted with the damping factor set
equal to the value chosen by
Abaqus/Standard
(or to the value you specified) in the previous step. This value is printed in
the message (.msg) file for the previous step. If it is
necessary to have an accurate static equilibrium solution after an instability
has occurred (and the model's behavior has returned to a stable regime), the
step with automatic stabilization can be followed by a step without such
stabilization.
Calculating the Damping Factor Based on the Dissipated Energy Fraction
It is assumed that the problem is stable at the beginning of the step and
that instabilities may develop in the course of the step. While the model is
stable, viscous forces and, therefore, the viscous energy dissipated are very
small. Thus, the additional artificial damping has no effect. If a local region
goes unstable, the local velocities increase and, consequently, part of the
strain energy then released is dissipated by the applied damping.
Abaqus/Standard
can, if necessary, reduce the time increment to permit the process to occur
without the unstable response causing very large displacements.
Abaqus/Standard
calculates and prints to the message file the damping factor,
c, based on the solution of the first increment of a step.
In most applications the first increment of the step is stable without the need
to apply damping. The damping factor is then determined in such a way that the
dissipated energy for a given increment with characteristics similar to the
first increment is a small fraction of the extrapolated strain energy. The
fraction is called the dissipated energy fraction
and has a default value of 2.0 × 10−4. If the default value for the
dissipated energy fraction is used, the adaptive automatic stabilization scheme
discussed in the next section will be activated automatically by default in the
step.
Alternatively, you can specify the non-default dissipated energy fraction
for automatic stabilization directly.
Considerations When the First Increment Is Unstable or Singular
There are cases where the first increment is either unstable or singular
(due to a rigid body mode). In such cases it is not possible to obtain a
solution to the first increment without applying some damping. Therefore, some
damping is already applied during the first increment. The damping factor used
for the initial increment is chosen such that the average element damping
matrix component, divided by the step time, is equal to the average element
stiffness matrix component multiplied by the dissipated energy fraction. If the
calculated strain energy change in this increment indicates that the solution
without damping is stable, the damping factor is recalculated based upon the
energy method described previously. However, if the strain energy change
indicates that the solution is unstable or singular, the initially calculated
damping factor is maintained, and a warning message is issued indicating that
the amount of damping applied may not be appropriate. In many cases the amount
of damping may actually be rather large, which can affect the solution in ways
that are not desirable. Therefore, if the above mentioned warning message is
issued, check the viscous forces (VF) and compare them with the expected nodal forces to make sure
that the viscous forces do not dominate the solution. If necessary, follow the
stabilized step with another step in which stabilization is not used or with a
step in which a much smaller damping factor is used.
Directly Specifying the Damping Factor
You can also specify the damping factor directly. Unfortunately, it is
generally quite difficult to make a reasonable estimate for the damping factor
unless a value is known from the output of previous runs; the damping factor
depends not only on the amount of damping but also on mesh size and material
behavior.
Adaptive Automatic Stabilization Scheme
As discussed above, the automatic stabilization scheme with a constant
damping factor typically works well to subside instabilities and to eliminate
rigid body modes without having a major effect on the solution. However, there
is no guarantee that the value of the damping factor is optimal or even
suitable in some cases. This is particularly true for thin shell models, in
which the damping factor may be too high when a poor estimation of the
extrapolated strain energy is made during the first increment. For such models
you may have to increase the damping factor if the convergence behavior is
problematic or to decrease the damping factor if it distorts the solution. The
former case would require you to rerun the analysis with a larger damping
factor, while the latter case would require you to perform postanalysis
comparison of the energy dissipated by viscous damping (ALLSD) to the total strain energy (ALLIE). Therefore, obtaining an optimal value for the damping factor
is a manual process requiring trial and error until a converged solution is
obtained and the dissipated stabilization energy is sufficiently small.
The adaptive automatic stabilization scheme, in which the damping factor can
vary spatially and with time, provides an effective alternative approach. In
this case the damping factor is controlled by the convergence history and the
ratio of the energy dissipated by viscous damping to the total strain energy.
If the convergence behavior is problematic because of instabilities or rigid
body modes,
Abaqus/Standard
automatically increases the damping factor. For example, the damping factor may
increase if an analysis takes extra severe discontinuity or equilibrium
iterations per increment or requires time increment cutbacks. On the other
hand,
Abaqus/Standard
may reduce the damping factor automatically if instabilities and rigid body
modes subside.
The ratio of the energy dissipated by viscous damping to the total strain
energy is limited by an accuracy tolerance that you specify. Such an accuracy
tolerance is imposed on the global level for the whole model. If the ratio of
the energy dissipated by viscous damping to the total strain energy for the
whole model exceeds the accuracy tolerance, the damping factor at each
individual element is adjusted to ensure that the ratio of the stabilization
energy to the strain energy is less than the accuracy tolerance on both the
global and local element level. The stabilization energy always increases,
while the strain energy may decrease. Therefore,
Abaqus/Standard
restricts the ratio of the incremental value of the stabilization energy to the
incremental value of the strain energy for each increment to ensure that this
value has not exceeded the accuracy tolerance if the ratio of the total
stabilization energy to the total strain energy exceeds the accuracy tolerance.
The accuracy tolerance is a targeted value and can be exceeded in some
situations, such as when there is rigid body motion or when significant
non-local instability occurs.
The default accuracy tolerance used by the adaptive automatic stabilization
scheme is 0.05. The default tolerance is suitable for most applications, but
you have the option of specifying a nondefault accuracy tolerance if necessary.
If the accuracy tolerance is set equal to zero, the adaptive automatic
stabilization scheme is not activated and the automatic stabilization scheme
with a constant damping factor will be used in the step.
If the accuracy tolerance is not specified but the dissipated energy
fraction with the default value of 2.0 × 10−4 is used, the adaptive
automatic damping algorithm will be activated automatically with an accuracy
tolerance of 0.05.
Default Value of the Initial Damping Factor
By default, the initial value of the damping factor is typically equal to
the value that would be used for automatic stabilization with a constant
damping factor (see
Calculating the Damping Factor Based on the Dissipated Energy Fraction
above). In some cases additional factors that are considered with adaptive
automatic stabilization cause some differences in the initial damping factor.
Specifying the Initial Damping Factor Directly
Alternatively, you can specify the initial damping factor directly. The
damping factor is adjusted based on the convergence history and the accuracy
tolerance through the step.
Propagating the Damping Factors from the Immediately Preceding General Step into the Current Step
Adaptive automatic stabilization provides an option to propagate the
damping factors from the immediately preceding general step to the subsequent
steps. The default is to not propagate the damping factors from the results of
the preceding general step. In this case
Abaqus
recalculates the initial damping factors based on the declared dissipated
energy faction and on the solution of the first increment of the step, or you
can specify the initial damping factors directly.
Ensuring That an Accurate Solution Is Obtained with Automatic Stabilization
Whenever automatic stabilization is applied to a problem, check the
following to ensure that accurate solutions are obtained:
For a damping factor calculated using the dissipated energy fraction,
check the factor printed to the message (.msg) file at the
end of the first increment to ensure that a reasonable amount of damping is
applied. Unfortunately, the damping factor is problem dependent; therefore, you
must rely on experience from previous runs.
Compare the viscous forces (VF) with the overall forces in the analysis, and ensure that the
viscous forces are relatively small compared with the overall forces in the
model.
Compare the viscous damping energy (ALLSD) with the total strain energy (ALLIE), and ensure that the ratio does not exceed the dissipated
energy fraction or any reasonable amount. The viscous damping energy may be
large if the structure undergoes a large amount of motion.
The automated procedure of computing damping factors works well for many
applications. However, there are cases where the computed damping factor is
either too small, thus not controlling the instability, or too high, thus
leading to inaccurate results. These problems are more likely to occur when
using a constant damping factor—the damping factor is computed in the first
increment, which may not be representative of behavior in the rest of the step.
For example, consider a sequentially coupled thermal-stress analysis in which a
mechanical analysis reads temperatures from a previous transient thermal
analysis. Typically the thermal analysis exhibits a diffusive process, where
rapid changes in temperature occurs early in the analysis and minor changes in
temperature occur once steady state is reached. In such a case
Abaqus
will compute the extrapolated strain energy based on the temperatures
corresponding to the time of the first increment (in this case there may be a
significant change in temperature for the first increment), thus yielding a
larger than expected extrapolated strain energy. This in turn leads to a
damping factor that is too large, resulting in inaccurate results.
If one of the automatic stabilization methods is not working appropriately,
you can try using the other automatic stabilization method; the adaptive
stabilization scheme is generally preferred. Alternatively, you can try
directly specifying the damping factor.
Input File Template
The
following template shows an example of specifying a gap distance to control
potential constraints exposed to the LCP
solver.
HEADING
…
STEP,PERTURBATIONSTATICData line to define time incrementation parametersSOLUTION TECHNIQUE,TYPE=LCP CONTACTOptional data line to define a gap distance and a gap scaling factorLOAD CASE,NAME=Case1CLOADData line(s) to define concentrated loads for the first load caseEND LOAD CASE
**
LOAD CASE,NAME=Case2BOUNDARYData line(s) to define boundary displacements for the second load caseEND LOAD CASE
…
END STEP