The periodic media analysis technique in
Abaqus/Explicit:
is a Lagrangian technique that offers an Eulerian-like view into a
moving structure;
can be used to effectively model systems that are repetitive in
nature, such as manufacturing processes involving conveyor belts or continuous
forming operations;
leads to significant analysis time speedup when compared to
traditional modeling techniques that may require excessively large meshes; and
requires topologically identical meshed parts to create the model,
which can be accomplished via the parts and instances modeling paradigm.
Quite often industrial processes that need to be analyzed involve sections
that repeat in a simple pattern and move through a process zone. A prominent
example is a conveyor belt with regularly spaced packages, as illustrated
schematically in
Figure 1
and exemplified with a finite element mesh in
Figure 2.
Continuous forming operations such as metal rolling are also good examples
because the deforming material can be broken up into an arbitrary number of
identical sections.
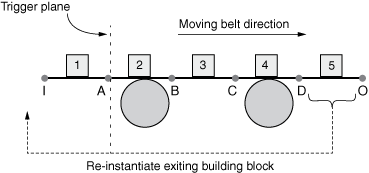
Schematic representation of periodic media. Conveyor belt with packages on top.
For the sake of clarity we will use the conveyor belt example throughout
this discussion to illustrate many of the concepts associated with the periodic
media analysis technique.
Figure 1
shows a conceptual decomposition of the conveyor belt; in reality, the belt is
a continuous entity.
Conceptually, the overall model can be decomposed into blocks (topologically
identical meshed structures) that are connected together and span the process
zone. You create a part that defines a “building block” (the meshed structure
that is repeated to model the entire periodic media) and then construct the
whole model via a chain of appropriately positioned instances. The periodic
media analysis technique provides a simple way to automatically connect these
instances together at the front and back ends of adjacent blocks. This
technique also provides a convenient way to define loads and boundary
conditions that represent the physical system at the unconnected ends of the
first and last blocks in the chain. The first block of the chain is referred to
as the inlet, and the last block is referred to as the outlet. Finally, when
the periodic media moves through the process zone, blocks from the outlet are
automatically shuffled to the inlet. The blocks (meshed structures) defined
with this technique can interact via contact with other modeling features that
are not periodic in nature, such as the rollers depicted in
Figure 1.
At the core of the periodic media analysis technique lies the concept of
shuffling blocks from the outlet back to the inlet. A dedicated algorithm is
used to detect when the inlet has moved too far into the process zone and to
shuffle a block from the outlet directly to the inlet. The dashed arrow in
Figure 1
illustrates the shuffling process. To ensure a smooth transition, the necessary
nodal and element state data from the inlet block are stored at the beginning
of the current step. When shuffling occurs, the stored nodal and element state
data are mapped to the new inlet block and any inlet/outlet loads or boundary
conditions are transferred to the newly exposed block ends.
Thus, the periodic media analysis technique offers a convenient way for an
Eulerian-like view into the moving repetitive structure. For example, you may
be interested in assessing the package dynamics on the belt at a location
somewhere between the rollers in both transient and steady-state conditions.
You define several blocks around that location, you define contact with the
rollers as necessary, and you provide appropriate inlet and outlet loading
conditions. The periodic media analysis technique provides a convenient and
economical way to create and analyze this system. By re-using elements that
have left the process zone via this shuffling process, you can avoid the large
meshes at the inlet end required for purely Lagrangian simulations.
Constructing a Periodic Media Model
The first step in constructing a periodic media model is to identify the
portion of the model that constitutes the building block of the repetitive
structure. In
Figure 2
one square belt patch together with one asymmetrically shaped package on top
constitute such a building block. If you string together several blocks, the
entire belt with packages can be modeled as shown.
Defining a Building Block
The following requirements must be observed when defining each building
block:
an unsorted element set must be defined to include all elements in the
building block, and
an unsorted node set must be defined to include all nodes in the
building block.
To ensure the proper transfer of information as the periodic media advances,
these unsorted sets must be topologically identical between all blocks. The
easiest way to achieve this requirement is to use the parts and instances
modeling paradigm. You define one part corresponding to the building block and
define unsorted element and node sets as discussed above. You then instantiate
the part as many times as needed with the appropriate translations and
rotations to generate the periodic media mesh. Constraints such as ties,
couplings, and rigid bodies are allowed within a building block. You must
ensure that these constraints are defined in a topologically identical fashion
in all blocks.
The periodic media analysis technique connects together these otherwise
unconnected blocks to create a continuous model. If structural elements (e.g.,
shells) are used in the connecting regions of the blocks, the nodes on the
edges of these regions are connected to the adjacent regions. If continuum
elements are used, the nodes on the faces of these regions are connected. For
these constraints to be constructed reliably, the following additional
requirements must be observed:
the nodal arrangements at the front and back connecting ends of blocks
must be topologically identical,
the front and back end nodes of adjacent blocks must be coincident,
the nodal arrangements at the front and back end of the initial inlet
block must have coordinates that differ only by a rigid body translation, and
two node-based surfaces created using unsorted node sets at the front
and back end of each block must be defined.
The node-based surfaces are used to automatically generate node-to-node tie
constraints between adjacent blocks such that the whole assembly behaves as a
continuous entity.
Applying Loads and Boundary Conditions at Media Ends
In the schematic belt shown in
Figure 1
you usually need to apply loads or boundary conditions at both ends of the
assembly. At the inlet point I it is often
useful to apply a pre-tension load that keeps the belt taut, while at the
outlet point O the belt velocity is usually
prescribed. As the belt advances and exiting blocks are being shuffled from the
outlet to the inlet, the nodes requiring the boundary conditions will change.
Therefore, these boundary conditions and loads cannot be prescribed directly at
nodes belonging to the block.
The periodic media analysis technique allows for the application of such
loading features via two control nodes that are associated with the current
inlet and outlet node-based surfaces. The control nodes are similar to
reference nodes used in other features (such as kinematic couplings) and impose
automatically defined rigid body–like constraints on the nodes at the extreme
ends of the assembly. You apply loads and boundary conditions at these control
nodes. A rigid body–like constraint is also imposed on the front end nodes of
the inlet block, but no loads or boundary conditions can be applied during
shuffling. When exiting blocks are being shuffled back to the inlet, the
control points will enforce these rigid body–like constraints on the new
extreme end surfaces and remove the rigid body–like constraints from the
previous locations. The process is automatic and fully managed by the periodic
media analysis technique.
Since the initial configuration of the very first inlet block at the
beginning of the shuffling step will be used as a template to initialize the
blocks when they are shuffled back to the inlet end, the block should be kept
inline with the moving direction to prevent drifting of the inlet edge during
shuffling. We recommend that you apply boundary conditions at the inlet control
node and front end nodes in the pre-stretching (no block shuffling) step to
prevent movement in the direction perpendicular to the moving direction in the
shuffling step.
Defining the Process Zone
When the inlet block moves completely into the process zone, the outlet
block is shuffled back to the inlet, as the dashed arrow indicates in
Figure 1.
A trigger plane controls the precise timing for when the shuffling occurs. When
the nodes located at the current inlet point I cross the trigger plane, the
shuffling process is launched. The trigger plane is defined using the
coordinates of a (usually) stationary node and the z-axis
of a user-defined orientation. The local z-axis direction
points from the inlet toward the process zone.
Activating a Periodic Media
The shuffling process can be activated on a step-by-step basis. By default,
the shuffling process is inactive. In many cases the configuration of the
periodic media in the operating condition can be determined only via
simulation. This allows any number of analysis steps to be carried out prior to
activating the shuffling process.
The example illustrated in
Figure 2
and in
Media transport
shows a conveyor belt transporting asymmetrical packages placed initially at
regular intervals. In its operating condition the belt will be tensioned. You
can pre-stretch the belt assembly in either
Abaqus/Standard
or
Abaqus/Explicit.
If the pre-stretch analysis is conducted in
Abaqus/Standard,
all ties between adjacent blocks as well as boundary conditions at the inlet
and outlet ends nodes need to be defined explicitly as the periodic media
analysis technique is available only in
Abaqus/Explicit.
If the pre-stretching step is conducted in
Abaqus/Explicit,
the shuffling process should remain inactive during the pre-stretching step. A
boundary condition should be applied at the front end of the inlet block to
keep the inlet block aligned with the direction of the movement in the
pre-stretching step, and this boundary condition should be removed after the
shuffling process is activated in the following step.
Modeling Tips
The periodic media analysis technique is a powerful feature; however, you
must exercise good engineering judgement when using it. The following comments
and recommendations will help you avoid common pitfalls when using this
technique:
The block shuffling process is inherently noisy as chunks of elements
are detached at one end and reattached at the other. Although the process uses
appropriate material and kinematic states, small shocks are inherent to the
process. A small amount of mass proportional damping is recommended to dampen
out this excitation.
The combination of boundary conditions at the inlet control node and any
loads applied in the process zone should ensure that the inlet block moves
across the trigger plane without a change in direction. In the conveyor belt
example, a good modeling practice would be to place a fixed guide roller at
least two blocks away from the trigger plane.
For more complex geometries (such as belts that change direction between
rollers or package wrapping analyses when the belt is the wrapping material
itself), it may be necessary to start with a straight sequence of blocks and
move the belt rollers (which are not part of the periodic media definition)
into the desired locations. Contact interaction between the belt and the
rollers would deform the belt in the desired configuration. This additional
analysis step can greatly simplify the definition of the initial mesh.
Sometimes it may be necessary to model the process of threading a belt
wrapping through rollers, just as in physical reality at the start of a
manufacturing process. If this leading segment is followed by periodic blocks
that include actual packages, you can attach the periodic media mesh to a
regular mesh to execute the threading. The periodic media part of the mesh can
then be imported into a separate model without the leading mesh, and the
analysis of the periodic media consisting only of the wrapper and packages can
be executed.
Initial Conditions
Initial conditions can be specified at all nodes in the periodic media mesh.
Velocity initial boundary conditions can be used to minimize the solution time
needed to reach a steady-state operating condition. In cases where
pre-stretching is required, importing from the prior analysis rather than
performing a multistep analysis allows for initial conditions to be applied to
the stretched configuration. Since periodic media definitions are not imported,
they must be respecified in every analysis in which they are required.
Boundary Conditions
The inlet and outlet control nodes are the only two nodes associated with a
periodic media definition at which boundary conditions can be specified when it
is active. Furthermore, only velocity boundary conditions are permitted. You
must not specify boundary conditions at any other node associated with the
periodic media mesh when it is active. While the periodic media is active and
if a steady-state solution is sought, these boundary conditions should be kept
constant in both direction and magnitude to mitigate solution noise.
Loads
Only concentrated loads can be applied to the inlet and outlet control nodes
to either drive or stretch the periodic media. While the periodic media is
active, these loads should be kept constant in both direction and magnitude.
Gravity loads can be applied as desired. Other distributed loads can also be
specified; however, you must keep in mind that the loads will travel with the
blocks as they are shuffled.
Material Options
All available material models are supported.
Limitations
Periodic media analyses are subject to the following limitations:
Only membranes, shells, trusses, continuum elements, and rigid elements
are allowed within blocks. Rebar layers can also be used, if applicable.
No explicitly defined constraints are allowed between nodes belonging to
different blocks.
Mass scaling must be defined in the same fashion for all blocks.
The periodic media should not be involved in
general contact that defines thermal contact properties or coupled
Eulerian-Lagrangian contact or
contact defined via the contact pair algorithm.
Input File Template
The following example illustrates a model with two
periodic media defined:
*HEADING
…
*PERIODIC MEDIA, NAME=belt1, INLET CONTROL NODE=10,
OUTLET CONTROL NODE=110, ORIENTATION=ori1, TRIGGER NODE=210
elset1, nodeset1, frontedgesurf1, backedgesurf1elset2, nodeset1, frontedgesurf2, backedgesurf2elset3, nodeset1, frontedgesurf3, backedgesurf3
*PERIODIC MEDIA, NAME=belt2, INLET CONTROL NODE=11,
OUTLET CONTROL NODE=111, ORIENTATION=ori2, TRIGGER NODE=211
elset1, nodeset1, frontedgesurf1, backedgesurf1elset2, nodeset1, frontedgesurf2, backedgesurf2elset3, nodeset1, frontedgesurf3, backedgesurf3
*STEP
*DYNAMIC, EXPLICIT
*MEDIA TRANSPORT
belt1, ACTIVE
belt2, INACTIVE
*END STEP